Circuitos de controle do contator e proteção do motor
 Dependendo da função a ser executada, existem diferentes circuitos de controle do motor do contator.
Dependendo da função a ser executada, existem diferentes circuitos de controle do motor do contator.
A Figura 1a mostra um esquema combinado de uma partida magnética irreversível... Nela, a disposição dos elementos coincide com a disposição na natureza, ou seja, todos os elementos localizados na caixa de partida são agrupados no lado esquerdo do diagrama, e estação de botão com botões «Iniciar» e «Parar» mostrado no lado direito do diagrama.
A estação do botão geralmente está localizada a alguma distância do partida magnética… Para entender o princípio de operação do circuito de controle do motor, geralmente são usados diagramas detalhados (básicos) (Fig. 1.b). Ao pressionar o botão de partida SB2, o circuito da bobina do contator KM é fechado, o que inclui três contatos KM do circuito de alimentação do motor. Nesse caso, o contato de bloco KM conectado em paralelo com o botão de partida SB2 também fecha. Isso permite que você energize a bobina KM quando o botão SB2 for liberado.
O motor é parado pressionando o botão SB1 enquanto a bobina desliga e libera os contatos de potência (principal) e o contato auxiliar. Ao soltar o botão SB1, o circuito da bobina KM será desenergizado. Para reiniciar o motor, pressione o botão SB2 novamente.
Este circuito também fornece a chamada proteção zero, ou seja, se a tensão da rede desaparecer ou cair para 50-60% do nominal, a bobina KM não reterá os contatos de energia KM e o motor será desligado. Quando uma tensão aparece ou aumenta para um valor próximo ao valor nominal, a partida magnética não será acionada espontaneamente. Para ligá-lo, você precisa pressionar o botão Iniciar novamente.
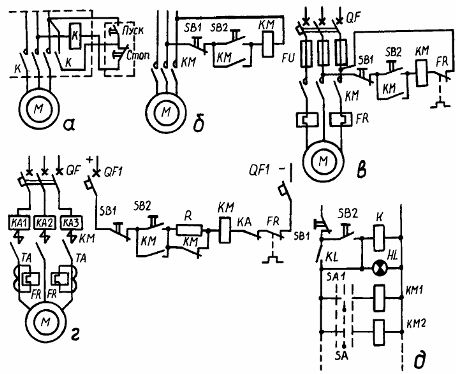
Arroz. 1. Esquemas de controle e proteção de motores: a — combinado e b — esquema detalhado de um acionador de partida magnético irreversível; c — proteção do motor por meio de fusíveis e relés térmicos; d — diagrama da poderosa estação de controle do motor; d — proteção zero de um relé intermediário
A proteção do motor contra superaquecimento do enrolamento é realizada durante sobrecargas prolongadas relés térmicos FR, e a proteção contra grandes sobrecargas ou curtos-circuitos é fornecida pelos fusíveis FU ou disjuntores QF (Fig. 1, c). Para proteger contra sobrecargas prolongadas, são utilizados dois relés térmicos, pois com um relé, no caso de um fusível queimado, em série com o qual o elemento de aquecimento deste relé está conectado, o motor será conectado a uma rede monofásica e eles não serão protegidos. Os contatos de corte desses relés são conectados em série com a bobina de partida. Quando um deles abre, a bobina KM é desenergizada e o motor para, como quando o botão SB1 é pressionado.
Uma estação de controle de motor de alta potência é mostrada na fig. 1, d. A proteção contra curto-circuito é fornecida pelo relé de sobrecarga KA1 — KA3, a proteção contra sobrecarga é fornecida por relés térmicos FR conectados através de transformadores de corrente. A bobina de um contator tripolar é alimentada com corrente contínua. Para reduzir a corrente na bobina do contator após sua inclusão no circuito, é introduzida uma resistência adicional R, que foi previamente encurtada pelo contato aberto KM.
Em circuitos de controle manual com vários controladores, interruptores ou outros dispositivos, relés intermediários são usados para fornecer proteção de neutro. (Fig. 1, e). Para aplicar tensão ao circuito de controle, pressione o botão SB2, ligando assim o relé intermediário K, que inclui seu contato de fechamento K e a lâmpada de sinalização HL, indicando a presença de tensão no circuito de controle . Depois de soltar o botão SB2, a bobina do relé será bloqueada enquanto os circuitos do controlador SM1, comutador de pacotes SM, etc. e as bobinas dos contatores KM1, KM2, etc., serão energizadas.
Nos esquemas considerados, os contatos autotravantes são necessários para a operação contínua dos motores. Muitas vezes, na prática, o motor só precisa funcionar quando o botão de partida é pressionado, por exemplo, em máquinas elevatórias. Neste caso, não há botão Stop no circuito de controle (Fig. 2, a). Às vezes é necessário garantir o funcionamento do drive em dois modos, ou seja, ligá-lo por um curto período de tempo ao configurar a máquina ou por um longo período de tempo. Em seguida, com um breve toque no botão SB2 (Fig. 2.b), a bobina do contator KM será ligada e o contato de autotravamento do KM será fechado, enquanto o motor funcionará ao soltar o botão SB2 .
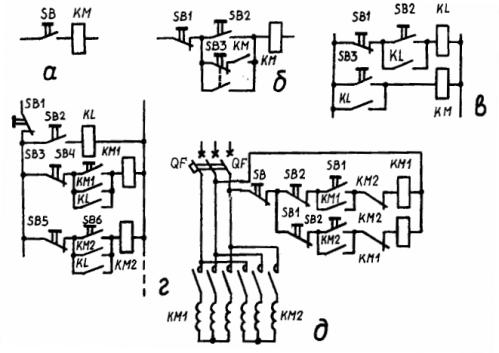
Arroz. 2. Tipos de circuitos de controle para motores assíncronos: a — em modo jogging; b e c — durante trabalho prolongado e jogging; d — inclusão simultânea de vários motores; d — partida contínua de um motor de duas velocidades
Para o modo de controle do motor, pressione o botão SB3, seu contato de fechamento liga a bobina do contator KM e o contato de abertura interrompe o circuito de travamento automático do contator. A desvantagem desse circuito é que o contato aberto do botão SB3 pode fechar antes que o contato do bloco KM abra e o motor não desligue. O circuito mostrado na fig. 2, f, é desprovida desse defeito.
Para operação contínua, pressionar o botão SB2 liga o relé intermediário K. Um dos contatos K liga a bobina do contator KM e o outro bloqueia simultaneamente o botão SB2, desligando assim o funcionamento do motor com o botão Iniciar lançado. Para iniciar a operação, pressione o botão SB3 e segure-o pelo tempo necessário.
A Figura 2d mostra um esquema para iniciar vários motores ao mesmo tempo a partir de um botão de partida usando um relé intermediário ... O botão SB2 liga o relé K, cujos contatos de fechamento ligam simultaneamente as bobinas dos contatores KM1, KM2, etc. Pare todos os motores simultaneamente com o botão SB1. Para ligar e desligar cada motor individualmente, utilize os botões SB3, SB4 e SB5, SB6, etc. respectivamente.
Um diagrama de partida contínua de um motor de rotor de gaiola de esquilo de dois enrolamentos e duas velocidades mostrado na Fig. 2, e. Para ligar o motor na primeira velocidade, o botão SB1 é usado, no segundo - SB2.Ambos os botões são mecanicamente interligados para evitar que o motor engate em duas velocidades ao mesmo tempo.
Os circuitos de partida também são bloqueados eletricamente. Assim, quando, por exemplo, a bobina KM1 é acionada, o contato de abertura interrompe o circuito da bobina KM2, excluindo a possibilidade de sua inclusão. Para mudar para a segunda velocidade, você precisa pressionar o botão SB2, enquanto o circuito da bobina KM1 é interrompido e desliga. A bobina do circuito KM2 recebe energia e liga o motor na segunda velocidade.
O controle reverso de motores assíncronos é realizado usando dois contatores (Fig. 3, a).
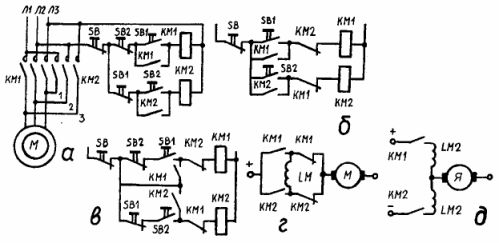
Figo. 3. Esquemas de controle do motor: a — partida magnética reversível com bloqueio mecânico; b — o mesmo com bloqueio elétrico; c — uma combinação das opções a e b; d e e — partida e reversão de motores CC de baixa potência
O contator KM1 é usado para engatar o motor em avanço e o KM2 é usado em reverso. Para evitar o acionamento simultâneo acidental dos dois contatores, o que leva a um curto-circuito, o circuito usa (ver Fig. 3, a) bloqueio mecânico mútuo com dois contatos de interrupção dos botões SB1 e SB2. Pressionando o botão SB1, ligue o circuito da bobina KM1 e desconecte o circuito da bobina KM2.
Quando os botões SB1 e SB2 são pressionados simultaneamente, os circuitos das bobinas KM1 e KM2 são interrompidos e nenhum dos contatores liga. O bloqueio é realizado por dois contatos de interrupção KM2 e KM1, incluídos nos circuitos das bobinas KM1 e KM2, respectivamente (Fig. 3, b). Para inverter o motor neste esquema, você deve primeiro pressionar o botão SB.
O circuito da fig. 3, c é uma combinação dos dois circuitos anteriores, ou seja, há bloqueio duplo.O botão SBI liga o contator KM1, e o circuito da bobina do contator KM2 é interrompido pelo contato simultaneamente aberto do botão SB1 e o contato do bloco KM1.
A Figura 3, d e e mostra os esquemas mais simples para iniciar e reverter motores de excitação sequencial de baixa potência ... Esses motores são conectados à rede sem reostatos de partida. De acordo com o esquema da fig. 3, d, a partida e reversão do motor com excitação em série é realizada por meio de dois relés intermediários. O motor é revertido invertendo a direção da corrente na bobina de campo LM. Em motores com dois enrolamentos de campo em série criando fluxos magnéticos em direções opostas, o circuito de comutação e reversão possui apenas dois contatos de contato (consulte a Fig. 3, e).
Como pode ser visto nos esquemas de controle considerados, é mais fácil automatizar o processo de partida e reversão de motores assíncronos de rotor de gaiola de esquilo. Nesse caso, todo o controle na partida se reduz a conectar o motor à rede elétrica e ao parar - a desconectar da rede.
Mais complexa é a automação de partida, parada e parada de motores de indução com enrolamento de fase do rotor, motores de gaiola de esquilo de indução de potência aumentada, motores de corrente contínua de média e alta potência, motores de indução multivelocidade com partida escalonada, bem como como motores síncronos. Esses motores são controlados em função do tempo, velocidade e atual.
Além dos casos acima, o controle do motor pode ser executado e de acordo com o princípio do caminho, quando o motor liga e desacelera quando o corpo de trabalho atinge uma determinada posição no espaço.Os sistemas que executam tais funções são chamados de sistemas de malha aberta porque não possuem realimentação entre o valor de saída e o valor de entrada.