Circuitos de controle do motor em função da velocidade
 No controle do motor, a velocidade é monitorada em função da velocidade do rotor do motor para influenciar os elementos de controle correspondentes conforme ele muda.
No controle do motor, a velocidade é monitorada em função da velocidade do rotor do motor para influenciar os elementos de controle correspondentes conforme ele muda.
Relés de controle de velocidade ou pequenos geradores elétricos de medição podem ser usados em circuitos de controle de partida de motores. No entanto, eles são usados muito raramente para esses fins devido à complexidade do projeto, alto custo e confiabilidade insuficiente. Portanto, a velocidade do motor é controlada por métodos indiretos. Em motores assíncronos e síncronos, a frequência rotacional é controlada pela fem e frequência da corrente do rotor, e em motores de corrente contínua pela fem da armadura.
Na fig. 1, aeb mostram esquemas para partida automática de um motor DC com excitação paralela, dependendo da frequência de rotação e dependendo do EMF e da tensão da armadura a partir do momento da partida. O controle da frequência de rotação é feito medindo a EMF do motor, que varia proporcionalmente à frequência de rotação.
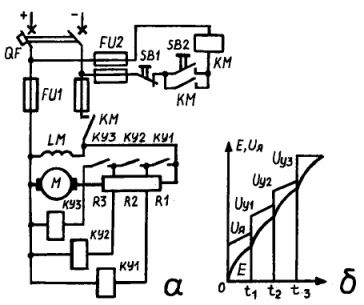
Arroz. 1.Circuitos de controle em função da velocidade: a e b — circuito e diagrama de partida de um motor CC com excitação paralela
Como o EMF é proporcional à rotação do motor, a entrada automática de estágios individuais do reostato de partida é realizada em uma certa magnitude da tensão de atuação dos contatores de aceleração KM1, KM2 e KMZ, cada um dos quais é ajustado para uma certa retração valor. Ao pressionar o botão de partida botões SB2 liga o contator de linha KM. Todas as resistências R1, R2, R3 serão conectadas em série com o enrolamento da armadura e limitarão a corrente.
A uma certa velocidade n1, a tensão Uy1 da bobina do contator K1 é

onde Aqui Este é o coeficiente da máquina.
Quando Uy1 for igual à tensão pull-down, o contator KM1 irá operar e causar um curto-circuito na resistência R1. Um novo aumento na velocidade de rotação até a rotação de n2 e n3 levará a um aumento da tensão nas bobinas dos contatores K2 e a um curto-circuito nos valores


Neste caso, os contatores K2 e o curto-circuito irão trabalhar em série e curto-circuitar as resistências R2 e R3. Depois de curto-circuitar a resistência R3, o processo de partida será concluído e o motor poderá funcionar por um longo tempo.
A EMF no circuito do rotor do motor de indução é proporcional ao escorregamento, ou seja, E2s = E2s. Aqui E2 é a fem de um rotor estacionário.
Quanto menor o escorregamento, menor a EMF, ou seja, maior a velocidade do rotor do motor. Para controlar a partida de motores CA com rotor bobinado, são utilizados relés que controlam o valor de EMF no circuito do rotor.Os dispositivos correspondentes (relés, contatores) que provocam curto-circuito nas resistências de partida são ajustados a essas tensões.
Para o controle de motores de indução de rotor bobinado e motores síncronos, o método da frequência também pode ser usado em função da velocidade. Este método é baseado na conhecida dependência da frequência da corrente do rotor f2 na frequência de rotação do campo do estator n0 e do rotor n2, ou seja,
Como cada velocidade do rotor corresponde a um determinado valor de f2, um relé ajustado para essa frequência e conectado ao circuito do rotor do motor atuará no circuito da bobina do contator. O contator irá curto-circuitar os estágios de resistência em uma determinada velocidade.
A frenagem por motores opostos é feita dependendo da velocidade relé de controle de velocidade SR. Na Fig. 2, a, b mostram exemplos de parada de motores assíncronos por oposição.
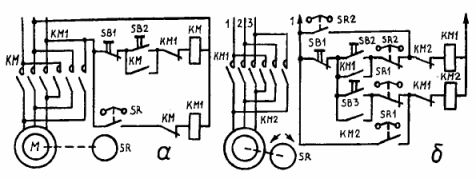
Arroz. 2. Esquemas de parada de motores assíncronos por meio de oposição: a — irreversível; b - reversível
Vamos dar uma olhada em como esses esquemas funcionam.
Pressionar o botão SB2 liga a bobina do contator KM (ver Fig. 2, a), que fecha os contatos de energia e bloqueia o botão SB2. Ao mesmo tempo, o contato do bloco de abertura KM no circuito da bobina do contator do freio KM1 e o relé de controle de velocidade SR os desconecta da rede. Quando o rotor do motor atingir uma determinada velocidade, o contato SR fechará, mas isso não fará mais com que o contator KM1 opere. O motor continua funcionando normalmente.
A parada do motor com um freio de contra-comutação é feita pressionando o botão SB.Ao mesmo tempo, a bobina do contator KM é neutralizada e seus contatos principais desaparecem e desconectam o motor da rede. O contato de abertura KM no circuito do contator do freio de KM1 fechará. Como neste momento o contato do relé de controle de velocidade SR está fechado, os contatos principais do contator do freio são imediatamente ligados e o enrolamento do estator é revertido, o campo magnético começará a girar na direção oposta, ou seja, a rotação do rotor e do motor será interrompida por comutação do contador. A velocidade do rotor diminui e em um determinado valor pequeno seus contatos do relé de controle de velocidade RKS abrem e desconectam o motor da rede elétrica.
No caso de controle reverso com frenagem oposta (Fig. 2, b), o motor é acionado para frente pressionando o botão SB1, que, fechando o circuito da bobina do contator KM1, garante que o motor esteja conectado ao rede. O rotor do motor começará a girar e quando atingir uma determinada velocidade, o contato de fechamento SR1 do relé de controle de velocidade será fechado e o contato de abertura SR2 será aberto.
O acionamento da bobina do contator KM2 não acontecerá porque o contato de abertura do contator KM1 interrompeu seu circuito. Nesta posição, o motor continuará funcionando até que o botão SB seja pressionado. Quando o botão SB é pressionado, o circuito da bobina KM1 é desligado. Isso fechará o contato de abertura KM1 e o circuito da bobina do contator KM2 receberá energia.
O enrolamento do estator do motor será acionado para reversão. Como o rotor continua a girar na mesma direção por inércia, ocorre a frenagem por oposição.Quando a velocidade diminui para um determinado valor pequeno, o relé de controle de velocidade abre seu contato SR1, o contator KM2 desliga e desconecta o motor da rede.
Para ligar o motor em marcha à ré, pressione o botão SB2. Todo o processo será semelhante ao descrito. Agora o papel do contator de freio é desempenhado pelo contator KM1, e os contatos SR2 do relé de controle de velocidade controlarão o processo de frenagem.
A partida automática de um motor síncrono está associada a dificuldades bem conhecidas, pois neste caso é necessário não apenas limitar a corrente de partida, mas também sincronizar a máquina com a rede.
O circuito de controle para um motor síncrono de baixa potência é mostrado na Fig. 3. A limitação da corrente de irrupção é fornecida por resistências ativas incluídas no enrolamento do estator. Antes de ligar o motor, ligue as chaves automáticas de entrada QF e QF1 da rede elétrica CA e CC, que fornecem proteção máxima e térmica. Ao pressionar o botão de partida SB2, a bobina do contator KM é ligada e o enrolamento do estator do motor síncrono através dos contatos principais do KM é conectado à rede através dos resistores de partida Rn. A bobina é autotravante e seu contato no circuito CC inclui o relé de travamento KV, cujo contato de fechamento, fechando, prepara as bobinas dos contatores K1 e K2 para ligar.
Os relés de frequência KF1 e KF2 no circuito de excitação do rotor linear operam dependendo da rotação do motor.Na partida, quando o escorregamento do rotor é maior, os contatos de interrupção dos relés KF1 e KF2 abrem.A abertura das bobinas ocorre antes que o relé de bloqueio KV ligue e a bobina K1 não receberá energia. Os contatos do relé KF1 e KF2 fecharão novamente quando a rotação do motor atingir aproximadamente 60-95% de forma síncrona de acordo com a regulação do relé.
Depois de fechar os contatos do relé KF1, a bobina do contator K1 ligará, seus contatos no circuito principal causarão um curto-circuito nos resistores de partida Rp e o estator ligará à tensão total da linha. Quando os contatos abertos do relé KF2 são fechados, um circuito é criado para alimentar a bobina do contator K2, independente do contator K1, seu contato abre a uma velocidade de aproximadamente 60% da velocidade síncrona.
O contator K2 possui dois enrolamentos: um principal, puxando KM1 e o segundo enrolamento KM2, projetado para liberar a trava, que é fornecido com o contator. Após ligar a bobina receptora KM1, os contatos de fechamento K2 fecham no circuito de excitação e os contatos de abertura K2 abrem, desconectando o enrolamento do rotor dos resistores de descarga R1 e R2 e conectando o rotor à rede CC.
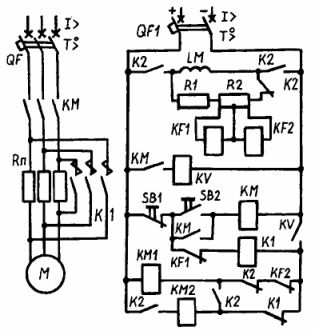
Arroz. 3. Esquema de controle do motor síncrono
Os contatos do contator K2 funcionam na seguinte ordem. O contato N/O K2 abre no circuito de alimentação da bobina de pickup, mas a ação de bloqueio mantém o contator energizado. Os contatos de fechamento K2 fecham no circuito de alimentação das duas bobinas e no circuito da bobina KM2, preparando o circuito para o acendimento posterior. A bobina K2 será desenergizada assim que o mecanismo de travamento for liberado da bobina KM2. O motor é desconectado da rede elétrica pressionando o botão SB1.A bobina K1 libera seu contato de abertura no circuito da bobina KM2, que libera a trava e desliga a bobina KM1, após o que o circuito retorna à sua posição original.