Controle do motor em função da corrente
 O controle do motor pode ser feito dependendo da intensidade da corrente do estator. O circuito de partida em função da corrente de um motor de indução de rotor bobinado é mostrado na Fig. 1 a.
O controle do motor pode ser feito dependendo da intensidade da corrente do estator. O circuito de partida em função da corrente de um motor de indução de rotor bobinado é mostrado na Fig. 1 a.
No momento da partida, a corrente atinge o valor I1, e após um certo intervalo de tempo diminui para o valor I2 (fig. b). Neste ponto, parte da resistência de partida no circuito do rotor é automaticamente curto-circuitada, a corrente sobe para o valor I1, depois cai novamente para o valor I2, o que faz com que outra parte da resistência de partida entre em curto. Este processo é repetido até que todos os estágios da resistência de partida estejam em curto-circuito. Para isso, é utilizado um relé de sobrecorrente, cujos enrolamentos estão incluídos no circuito de potência do motor.
Quando você clicar em botão de início SB1 (ver fig. A) o contator KM é ativado, cujos contatos principais conectam o motor à rede na resistência de partida comum no circuito do rotor. Nesse caso, a bobina do relé KA recebe energia, cujos contatos de abertura estão no circuito da bobina do acelerador K1.O relé KA é configurado para que o tempo de resposta seja menor que o do contator K1. Além disso, seus contatos de quebra no valor máximo permitido Corrente inicial abrem, e quando a corrente diminui para seu valor de comutação, eles fecham novamente, pelo que a bobina K1 é ligada através dos contatos do relé KA no momento do curto-circuito do estágio de resistência de partida.
O relé KA operará antes que o contator de aceleração K1 seja energizado e o motor acelerará quando a resistência de partida for totalmente introduzida. À medida que a corrente de comutação inicial diminui, os contatos do relé KA se fecham e a bobina K1 se liga. Ao mesmo tempo, o contato K1 fecha, proporcionando autoalimentação da bobina independentemente do relé KA, e o contato no circuito de controle se abre, evitando a inclusão prematura do acelerador K2.
Como os contatos de alimentação K1 fazem parte do curto-circuito da resistência de partida, a corrente do estator aumenta até o valor máximo e o relé KA, quando acionado, abre seus contatos no circuito de alimentação da bobina K2. Quando o motor atinge velocidade suficiente e a corrente do estator cai de volta para a corrente de comutação, os contatos do relé KA se fecham e ligam a bobina K2, que causa um curto-circuito no segundo estágio da resistência de partida em seus contatos.
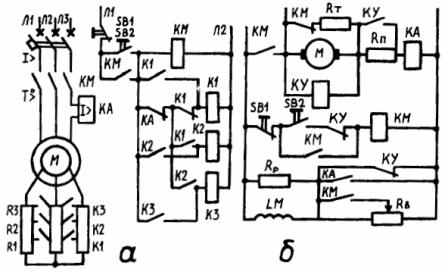
Arroz. 1. Circuitos de comando dependentes da corrente: a — motor assíncrono com rotor de fase; b — Motor DC com excitação paralela
Neste caso, a corrente do estator aumenta novamente, o relé KA irá operar e abrir seus contatos. A bobina K2 não perderá energia, pois terá tempo para fechar com os contatos auxiliares K2.Uma diminuição adicional na corrente do estator após a próxima aceleração fará com que o enrolamento K3 ligue e cause um curto-circuito no último estágio da resistência de partida. Pressionar o botão SB para o motor e o circuito está pronto para a próxima partida. Usando os relés de corrente configurados para retornar a uma corrente de 12, vários acionamentos elétricos podem ser parados e revertidos. A desvantagem dos circuitos de controle na função atual é o número bastante grande de contatos.
Para o controle irreversível de um motor CC de excitação paralela de vários quilowatts, pode ser usado um único estágio do reostato de partida (consulte a Fig. C). O diagrama mostra: regulando a resistência RB no circuito de excitação; resistência de descarga Rp conectada em paralelo com a bobina de excitação LM; uma resistência de frenagem RT conectada em paralelo à armadura M quando desconectada da rede e uma resistência de partida RP conectada em série ao circuito da armadura durante o período de partida. Para produzir fluxo máximo na inicialização, a bobina de campo LM na posição inicial é ligada em tensão total.
Quando o botão SB2 é pressionado, a armadura do motor do contator de linha KM é conectada em série à rede com a resistência RP O relé de controle de partida SC opera em função da corrente da armadura. Conforme a corrente aumenta, o contato de fechamento de KA manipula a resistência RB, aumentando o fluxo magnético de excitação, e conforme a corrente diminui, o contato de KA se abre e a bobina LM é ligada em série com a resistência do reostato RB, devido a qual a corrente magnética diminui.
Quando o motor é iniciado, a corrente de armadura de partida aumentada liga o relé KA e a bobina LM cria o fluxo máximo. Quando uma determinada velocidade é atingida, o contator de aceleração K é ligado, a resistência de partida RP é curto-circuitada, após o que o motor opera de acordo com suas características naturais. Quando a corrente de armadura diminui (como resultado da aceleração do motor) antes que o relé KA seja energizado, o contato KA no circuito de excitação será aberto.
O enrolamento LM ligará em série com a resistência RB, fazendo com que o fluxo de campo enfraqueça e a corrente de armadura aumente de acordo. O relé KA voltará a operar, aumentando o fluxo e simultaneamente aumentando a velocidade do motor. Durante a inicialização, o relé da espaçonave é acionado várias vezes até que o motor atinja a velocidade definida pelo reostato de controle RB. Tal dispositivo vibratório operando como uma função de corrente simplifica o circuito em comparação com os circuitos de controle em função do tempo.
Quando o motor é ligado pressionando o botão SB1, a armadura é ligada do contato de abertura KM para o resistor de frenagem RT e a frenagem dinâmica é executada automaticamente. No início da parada, o campo magnético é ligeiramente enfraquecido devido à abertura do contato KM no controle deslizante do reostato regulador, e a corrente de excitação passa por toda a resistência RB. À medida que a velocidade do motor diminui ainda mais, o contator de aceleração K é desenergizado e o fluxo aumenta à medida que a bobina de excitação é ligada à tensão total da linha através do contato de abertura K, resultando em um aumento no torque de frenagem.