Circuitos de controle do motor em função da estrada
 Automação ou controle direcional em uma função de caminho é usado para limitar o movimento de um mecanismo ou pará-lo em qualquer ponto intermediário ou final do caminho.
Automação ou controle direcional em uma função de caminho é usado para limitar o movimento de um mecanismo ou pará-lo em qualquer ponto intermediário ou final do caminho.
As principais opções para ciclos de trabalho controlados elementos de automação ferroviária, pode ser: desligamento automático do acionamento elétrico no final do ciclo, reversão com limitação automática da trajetória de movimento de cada elemento do acionamento sem tempo de retenção e com retenção nos pontos finais, reversão com parada do mecanismo após cada ciclo ou com um longo movimento de vaivém.
Nos casos em que o mau funcionamento do interruptor de limite pode levar a um acidente, são instalados interruptores de limite adicionais que desligam o motor.
Nos circuitos acionados, a seção de potência com partidas magnéticas não é mostrada: os contatos principais do circuito de alimentação são acionados: pela bobina KM com partida não reversível e bobinas KM1 e KM2 se a partida for reversível
Os diagramas na fig.a e b fornecem o desligamento do motor no final do movimento do mecanismo através da chave fim de curso e diferem entre si apenas em sua colocação no circuito de controle e nas características funcionais resultantes. No primeiro circuito, o motor parado pelo fim de curso não pode ser reiniciado na mesma direção pressionando botão de início, no segundo esquema o mecanismo pode continuar a se mover se o botão for pressionado novamente.
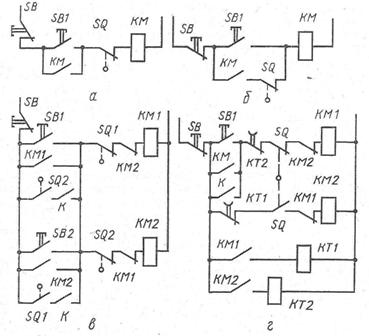
Arroz. Esquemas de controle do motor em função do curso com chaves fim de curso: a e b — desligamento do motor no final do movimento do mecanismo, c — com limitação do movimento do mecanismo, d — movimento cíclico com atraso das posições finais
O circuito de controle da Fig. c prevê o movimento do mecanismo ao longo de um caminho limitado por duas chaves fim de curso SQ1 e SQ2, e o trabalho pode ser realizado em cursos discretos e contínuos. No primeiro caso, o mecanismo começa a avançar quando o botão SB1 é pressionado e se move até pressionar o fim de curso SQ1. Para remover o mecanismo desta posição, pressione o botão SB2.
Os contatos de abertura KM2 e KM1 nos circuitos das bobinas KM1 e KM2 são usados para bloqueio.

Para a operação cíclica do mecanismo com diferentes atrasos nas posições finais, o diagrama da fig. d. Ao ligar o motor para frente, o botão de partida SB1 liga o relé de tempo KT1 e abre seu contato no circuito da bobina do contator KM2. O movimento continua até que o interruptor de disparo SQ seja acionado, o qual abre o circuito da bobina do contator KM1 e fecha o contato SQ ligado mecanicamente a ele. Mas a reversão não acontece imediatamente, porque o contato de abertura KT1 ainda está aberto.
O relé de tempo KT1, desconectado do contato KM1, faz a contagem regressiva do tempo definido e liga a bobina do contator KM2, girando o motor. Através do contato do bloco de fechamento KM2, o relé de tempo KT2 liga e interrompe o circuito da bobina KM1 com o contato KT2. O motor elétrico liga e move o mecanismo até que a chave fim de curso seja acionada, após o que o ciclo se repete na mesma ordem.
Se, de acordo com as condições de operação, for necessário um retardo de tempo em apenas uma posição final, então um relé de tempo e seu contato de abertura são desligados no circuito de controle.