Nós de circuitos de controle automático em função do tempo
 Eletromagnéticos, eletrônicos, motores e eletropneumáticos são amplamente utilizados em circuitos de automação. relé de tempo... Os esquemas de conversão de duração de sinal mais comuns são mostrados na fig. 1. Diagrama fig. 1, e fornece um pulso de certa duração, independentemente da duração da pressão botões SB. Depois de pressionar o botão SB, o relé K é ativado, o que dá um impulso para ligar o mecanismo. A duração do pulso é determinada pelo retardo de tempo do relé KT. O botão SB pode ser substituído por um relé de comando KQ.
Eletromagnéticos, eletrônicos, motores e eletropneumáticos são amplamente utilizados em circuitos de automação. relé de tempo... Os esquemas de conversão de duração de sinal mais comuns são mostrados na fig. 1. Diagrama fig. 1, e fornece um pulso de certa duração, independentemente da duração da pressão botões SB. Depois de pressionar o botão SB, o relé K é ativado, o que dá um impulso para ligar o mecanismo. A duração do pulso é determinada pelo retardo de tempo do relé KT. O botão SB pode ser substituído por um relé de comando KQ.
Diagramas Fig. 8, b (com relé de tempo eletromagnético) e fig. 1, c (com relé de tempo eletropneumático ou motorizado) são usados para fornecer um pulso de curta duração após o início da ação do comutador de deslocamento SQ. Nestes esquemas e subsequentes, em vez de contatos interruptor de movimento Contatos de relé KQ podem ser usados.
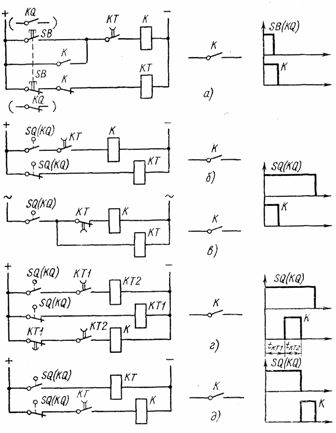
Arroz. 1. Circuitos para converter a duração dos sinais
Esquema fig.1d fornece um pulso de duração tKT2 com um atraso de tempo tKT1 após o início da ação do interruptor SQ.
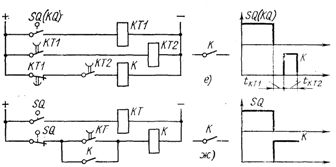
O nó do circuito Fig. 1, e. Se for necessário um retardo de tempo tKT1 antes que este pulso seja aplicado, o circuito na fig. 1, e. A duração do pulso é tKT2.
Em circuitos de controle posicional, o circuito da Fig. 1g, que desempenha a função de emitir um comando longo após o término do impacto na chave de desarme SQ. O comando é cancelado no início de uma nova ação no switch SQ.
Um atraso de tempo curto (até 1,5 s) pode ser obtido ligando e desligando de maneira convencional relés intermediários devido ao desvio de suas bobinas com capacitores ou diodos.
No diagrama da fig. 2, e quando o contato KQ é fechado, o relé K é acionado com um atraso de tempo determinado pelo tempo de carga do capacitor C. Quando KQ é fechado, o relé K também retorna com um atraso devido à descarga do capacitor.

Arroz. 2. Obtenção de atrasos de tempo desviando as bobinas de relés intermediários com capacitores ou diodos
Para obter um atraso de tempo somente quando o relé estiver ligado, use o circuito da Fig. 2, b. O atraso quando o relé é desligado está praticamente ausente, pois o capacitor descarrega rapidamente no resistor R (a resistência do resistor R é significativamente menor que a resistência da bobina do relé K). Um problema semelhante é resolvido pelo circuito da fig. 2c, que utiliza um contato de abertura do relé KQ. A desvantagem deste circuito é a perda significativa de energia através do resistor na ausência de um sinal.
O esquema na fig. 2d, onde quando o contato KQ abre, o relé K desliga com um retardo de tempo controlado pelo resistor R.
De acordo com o esquema da fig. 2, e um atraso de tempo é criado quando K é desligado após o contato do relé de comando KQ ser fechado.
Se for necessário um pequeno atraso no retorno do relé K quando o relé de comando KQ é ativado, o diagrama da fig. 2, e, em que a bobina do relé K é desviada por um diodo.
O esquema para gerar pulsos de uma determinada duração e ciclo de trabalho é mostrado na fig. 3, a. A duração do pulso é determinada pelo atraso do relé KT2, a pausa é determinada pelo tempo de atraso do relé KT1.
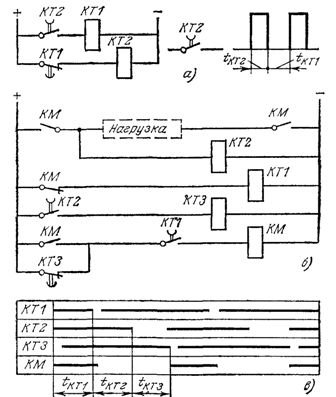
Arroz. 3. Circuitos de relé para geração de pulsos
Na fig. 3, b, é fornecido um diagrama da ativação periódica do mecanismo com um tempo de pausa prolongado. O tempo de ativação do contator KM é igual ao atraso do relé KT1, a duração da pausa é a soma dos atrasos do relé KT2 e KTZ. O diagrama de tempo é mostrado na Fig. 3, c.
Esquemas de geradores de pulsos de relés de tempo ou elementos lógicos (veja abaixo) também são usados para regular a velocidade de operação de mecanismos lineares. O controlador de temperatura também se difundiu, contendo um dispositivo de comando KEP-12U, em muitos aspectos semelhante a um relé de sincronização do motor. A unidade possui um motor executivo, engrenagens variáveis, came drum, switch e 12 contatos.
Os reguladores de velocidade geralmente usam o esquema para operação cíclica do dispositivo KEP-12U (Fig. 4, a). O circuito é feito usando os relés K1 e K2 e os contatos do dispositivo de comando KT.1 e KT.2, cujo diagrama de circuito é mostrado na fig. 4, b.
Antes de iniciar o trabalho, ligue o interruptor S.Quando o contato do relé KQ é fechado brevemente, dando um comando para iniciar o ciclo de trabalho, o relé K1 é energizado e trava automaticamente. O relé K2 é ativado ligando o dispositivo de comando KT. Os enrolamentos do motor LM1 e LM2 são energizados e o tambor do came começa a girar. Os contatos de saída do dispositivo KT.3, KT.4, etc., fechando sequencialmente, nos momentos de tempo definidos (veja o diagrama na Fig. 4, b) dão comandos para ligar os mecanismos lineares. No meio do ciclo, o contato KT.1 abre e o relé K1 desliga.
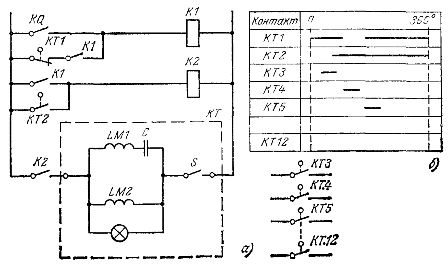
Figura 4. Controlador de velocidade de linha com o dispositivo KEP-12U
A bobina do relé K2 suporta a alimentação através do contato do dispositivo KT.2. Depois de girar o tambor em um ângulo de 360 °, o contato KT.2 se abre, o motor do dispositivo KEP-12U para. A corrente está pronta para o próximo ciclo.
Em conclusão, consideraremos dois esquemas para controle remoto do atraso dos relés de tempo eletromagnéticos.
Para alterar o atraso do painel de controle, você pode usar um circuito de relé de duas bobinas com bobinas de disparo KT.1 e bobinas de retorno KT. 2 (desmagnetização), cujos MDS são direcionados de forma oposta (Fig. 5, a). O MDS da bobina de liberação é ajustado usando o potenciômetro RP. Para evitar a operação repetida do TC após o retorno e o disparo da reversão da magnetização, o MDS da bobina de disparo deve ser menor que o MDS suficiente para puxar a armadura, ou deve ser introduzido seu próprio contato de fechamento do relé na bobina do circuito (Fig. 5, a).
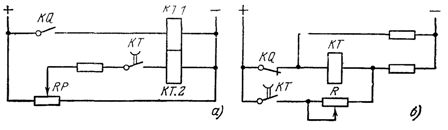
Figura 5. Esquema para ajuste remoto do atraso do relé de tempo
De acordo com o esquema da fig.5, b fazer uma mudança remota no tempo de atraso de um relé de bobina simples. Quando o contato KQ abre, a bobina do relé KT circula com uma corrente de desmagnetização que é regulada pelo resistor R. À medida que a corrente de desmagnetização aumenta, o atraso do relé diminui e vice-versa. Com uma tensão de alimentação de 220 V, é utilizado um relé com bobina para uma tensão nominal de 110 V.