Circuitos de controle do motor em função do tempo
 Este tipo de controle é utilizado quando todas as manobras do circuito elétrico do motor elétrico ocorrem em determinados instantes de tempo, por exemplo, ao automatizar o processo de partida de motores elétricos sem monitorar a velocidade ou a corrente. A duração dos intervalos é determinada e pode ser ajustada pelas configurações do relé de tempo.
Este tipo de controle é utilizado quando todas as manobras do circuito elétrico do motor elétrico ocorrem em determinados instantes de tempo, por exemplo, ao automatizar o processo de partida de motores elétricos sem monitorar a velocidade ou a corrente. A duração dos intervalos é determinada e pode ser ajustada pelas configurações do relé de tempo.
O controle de tempo recebeu a maior difusão na indústria devido à simplicidade e confiabilidade dos relés de tempo eletromagnéticos e eletrônicos de produção em massa.
Então, da fig. 1, a e b, pode-se ver que fechando o contato K do contator de linha, toda a resistência do reostato é incluída no circuito da armadura, igual a R1 + R2 + R3, e a inclusão das seções de resistência de partida pode ocorrer em determinados intervalos de tempo t1, t2 e t3 em determinadas velocidades do motor n1, n2, n3 e quando a corrente de partida cai para o valor definido I2. Os intervalos de tempo são escolhidos de forma que, com cada curto-circuito subsequente da resistência, a corrente do motor não exceda o I1 permitido.
À medida que o motor acelera de n = 0 para n1, a corrente diminui para I2 como resultado de um aumento na força eletromotriz traseira. Após um intervalo de tempo t1, o contato K1 fecha, desviando a resistência R1, o que leva a uma diminuição da resistência do reostato para R2 + R3, um novo aumento da corrente para I1, etc. No final da partida, o motor acelera até a velocidade nominal, o reostato de partida é completamente removido.
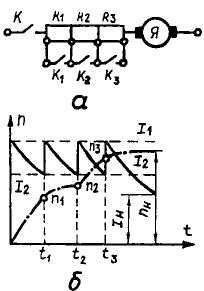
Arroz. 1. Circuitos de controle do motor em função do tempo: a — reostato de partida do motor CC, b — diagrama de partida
Considere alguns circuitos de controle de motores em função do tempo.
No controle dependente do tempo de um motor de indução com rotor bobinado (Fig. 2), o atraso de tempo necessário para curto-circuitar etapas individuais do reostato de partida é fornecido por relés de tempo pendular, cujo número é igual ao número de passos. O esquema funciona da seguinte maneira.
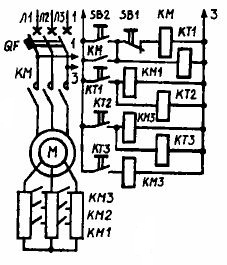
Arroz. 2. Circuito de controle em função do tempo de um motor de indução de rotor bobinado
Quando você clicar em botão SB1 recebe energia para a bobina do contator na linha KM, que conecta o estator do motor à rede elétrica. Ao mesmo tempo, o reostato de saída é totalmente introduzido. Juntamente com o contator, é acionado o relé de tempo KT1, que após um determinado intervalo de tempo fecha o contato no circuito da bobina do contator KM1.
O contator opera e fecha a primeira seção do reostato para iniciar o rotor. Ao mesmo tempo, liga o relé de tempo KT2, que fecha seus contatos com atraso e liga a bobina KM2 e o relé de tempo KTZ. Os contatos do contator KM2 curto-circuitam o segundo estágio KM2 do reostato de partida.Além disso, com um atraso de tempo, o contato do relé KTZ é acionado, ligando o enrolamento KMZ, que causa um curto-circuito no último estágio do reostato de partida KMZ, e o motor continua funcionando no futuro, como em um rotor esquilo.
O motor é parado pressionando o botão SB e, em caso de sobrecarga, o motor é desligado soltando a chave QF. Isso desliga o contator de linha, seu contato auxiliar KM e todos os contatores de aceleração e relés de tempo sem retardo. A corrente está pronta para o próximo ciclo.
Para iniciar a marcha lenta de um motor de indução com potência aumentada com a comutação do enrolamento do estator de uma estrela para um delta, você pode usar o diagrama da Fig. 3. O chaveamento neste circuito é feito automaticamente em função do tempo.Ao pressionar o botão SB2, o enrolamento do estator é conectado à rede pelo contator KM. Ao mesmo tempo, o relé de tempo KT e a bobina KY são conectados à rede, que conecta o enrolamento do estator a uma estrela por meio de três contatos no circuito de potência.
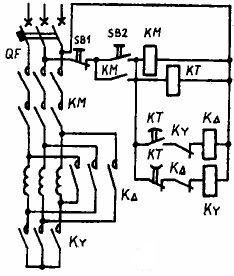
Arroz. 3. Circuito de controle em função do tempo de um motor de indução, alternando de Y para Δ
O motor arranca e acelera com tensão reduzida. Após um intervalo de tempo pré-determinado, o relé KT desliga o contator KY e liga a bobina do contator KΔ conectando o enrolamento do estator ao delta. Como existe um contato auxiliar KY no circuito da bobina K∆, o fechamento do contator K∆ não pode ocorrer antes do fechamento do contator KMY.
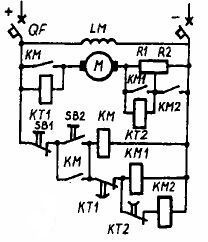
A partida escalonada de motores de indução multivelocidade é mais econômica e é feita em função do tempo.Vamos considerar um exemplo de partida passo a passo de um motor de duas velocidades com um único enrolamento (Fig. 4). O enrolamento do estator vai de delta para estrela dupla em velocidade dupla.
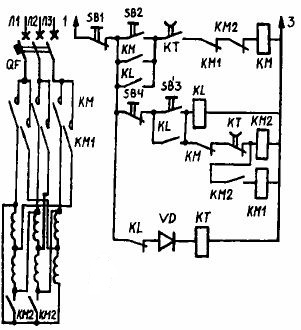
Arroz. 4. Circuito de controle em função do tempo de início da etapa do motor de indução
O motor é acionado pelo contator KM para o primeiro estágio de velocidade e pelos contatores KM2 e KM1 para o segundo. Para ligar o motor à primeira velocidade, pressionando o botão SB2 liga a bobina do contator KM e seus contatos de potência KM no circuito principal. O enrolamento do estator conectado em delta está conectado à rede. A bobina do relé de tempo KT é energizada e seu contato de fechamento (no circuito da bobina KM) é fechado.
 Uma partida passo a passo do motor na segunda velocidade de rotação é realizada por meio de um relé intermediário K, cujo circuito é fechado pelo botão de partida SB3. Os contatos de fechamento K contornam os dois botões de partida e o contato de abertura K desenergiza o relé de tempo KT. O contato de fechamento KT no circuito da bobina KM desliga com um atraso de retorno, devido ao qual a bobina KM no primeiro período de partida acaba sendo fechada e o motor liga na primeira velocidade.
Uma partida passo a passo do motor na segunda velocidade de rotação é realizada por meio de um relé intermediário K, cujo circuito é fechado pelo botão de partida SB3. Os contatos de fechamento K contornam os dois botões de partida e o contato de abertura K desenergiza o relé de tempo KT. O contato de fechamento KT no circuito da bobina KM desliga com um atraso de retorno, devido ao qual a bobina KM no primeiro período de partida acaba sendo fechada e o motor liga na primeira velocidade.
O contato do bloco KM no circuito da bobina KM2 e KM1 abre. Essas bobinas também são desconectadas do contato aberto KT, que é atrasado no retorno. Após um determinado período de tempo, o contato de fechamento KT desligará a bobina KM, e seu contato de abertura ligará as bobinas dos contatores da segunda velocidade de rotação KM1 e KM2. Seus contatos principais no circuito de alimentação mudarão o enrolamento do estator para estrela dupla e o conectarão à rede elétrica.
Portanto, o motor primeiro acelera para a primeira marcha e depois muda automaticamente para a segunda marcha. Observe que a conexão preliminar do enrolamento do estator a uma estrela dupla e sua posterior inclusão na rede é realizada primeiro ligando dois contatos de fechamento da fonte de alimentação KM2 e, em seguida, três contatos principais de fechamento KM1. Essa sequência de comutação é alcançada pelo fato de a bobina KM1 estar conectada à tensão através do contato do bloco de fechamento KM2. O motor é parado pressionando o botão «Stop», marcado no diagrama com a letra SB1.
Na fig. 5 mostra um diagrama da partida automática de um motor CC de excitação paralela em função do tempo. Ao fechar o disjuntor QF, o motor está preparado para partir. A corrente flui através do circuito que consiste no enrolamento do relé de tempo KT1, a armadura do motor M e dois estágios do reostato de partida R1 + R2.
Arroz. 5. Circuito de controle em função do tempo de um motor CC excitado
Devido à alta resistência da bobina do relé KT1, a corrente neste circuito é muito pequena e não afeta o motor, mas o próprio relé é acionado e seu contato aberto no circuito do contator KM1 abre. Na bobina do segundo relé de tempo KT2, conectado em paralelo com a resistência R1, uma corrente tão pequena é ramificada que não pode ser ligada. O enrolamento de campo LM do motor também liga.
O motor é iniciado pressionando o botão SB2. Ao mesmo tempo, o contator KM e seu contato no circuito de armadura do motor são acionados. A grande corrente de partida é limitada por dois estágios de reostato R1 e R2.Parte dessa corrente é ramificada na bobina do relé KT2 e quando acionada abre seu contato KT2 no circuito do contator KM2. Simultaneamente ao fechamento do circuito da armadura M, o contato de trabalho do contator KM causa um curto-circuito na bobina do relé KT1.
Após um certo intervalo de tempo quando o relé retorna, KT1 fechará seu contato KT1 no circuito do contator KM1. Este contator com seu contato de trabalho KM1 irá curto-circuitar o primeiro estágio R1 do reostato de partida e o enrolamento do relé de tempo KT2. Com um atraso de retorno, seus contatos de trabalho KT2 ligarão o contator KM2, que com seus contatos de trabalho KM2 causará um curto-circuito no segundo estágio R2 do reostato de partida. Isso completa a partida do motor.
Quando o botão SB1 é pressionado, o contator KM dispara e desconecta seu contato principal no circuito da armadura. A armadura permanece energizada, mas acontece que está conectada em série com a bobina do relé KT1, devido à qual uma pequena corrente flui através dela. O relé KT1 funcionará, abrirá seu contato no circuito dos contatores KM1 e KM2, eles desligarão e abrirão seus contatos, resistências de curto-circuito R1 e R2. O motor irá parar, mas seu enrolamento de campo permanece conectado à rede elétrica e assim o motor está preparado para a próxima partida. O desligamento completo do motor é feito desligando o interruptor de entrada automática BB.
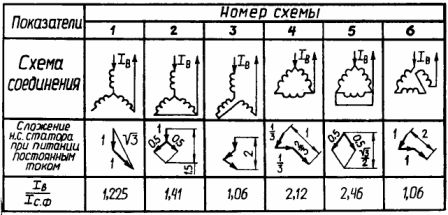
A frenagem dinâmica dos motores também é realizada em função do tempo. Para frenagem dinâmica, por exemplo, um motor de indução, o enrolamento do estator é desconectado da rede de corrente alternada e, de acordo com um dos esquemas mostrados na tabela 1, é conectado a uma fonte de corrente contínua.Na indústria florestal e madeireira, a corrente contínua é obtida de retificadores semicondutores especiais. Neste caso, não há necessidade de uma fonte especial de corrente contínua.
Quando o enrolamento do estator é ligado de acordo com um dos esquemas (consulte a Tabela 1), um campo magnético estacionário é criado no enrolamento do retificador. Em um campo estacionário, o rotor do motor continua a girar por inércia. Nesse caso, uma CEM e corrente alternadas serão criadas no rotor do motor, o que excitará um campo magnético alternado. A mudança do campo magnético do rotor ao interagir com o campo estacionário do estator cria um torque de frenagem. Nesse caso, a energia cinética armazenada do rotor e do acionamento é convertida em energia elétrica nos circuitos do rotor e esta em calor.
A energia térmica é dissipada do circuito do rotor para o ambiente. O calor gerado no rotor aquecerá o motor. A quantidade de calor liberada depende da corrente no enrolamento do estator quando ele é alimentado com corrente contínua. Dependendo do esquema adotado para ligar o enrolamento do estator quando este é alimentado com corrente contínua, a relação entre corrente e corrente de fase do estator será diferente. As relações dessas correntes para vários esquemas de comutação são mostradas em uma tabela. 1
O circuito de frenagem dinâmica de um motor de indução é mostrado na fig. 6.
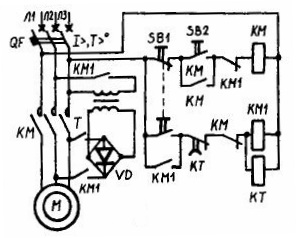
Arroz. 6. Esquema de frenagem dinâmica de um motor de indução
Ao pressionar o botão de partida SB1, o contator de linha KM liga o motor à rede CA, seu contato de bloqueio de fechamento muda a bobina KM para autoalimentada.A abertura do contato KM desliga o circuito de alimentação do contator do freio KM1 e do relé de tempo KT. Quando o botão SB é pressionado, o contator da linha KM é desenergizado e o circuito da bobina do contator KM1 é energizado.
O contator KM1 inclui seus contatos KM1 no circuito do transformador T e do retificador V, pelo que o enrolamento do estator será alimentado com corrente contínua. Para evitar a comutação independente aleatória do contator de linha, o contato de abertura do bloco KM1 é conectado em série com sua bobina KM. Simultaneamente com o contator de freio, o relé de tempo KT é ligado, que é configurado para que seu contato aberto KT seja desligue a bobina KM1 e o relé de tempo após um determinado intervalo de tempo. O ajuste do relé de tempo KT é escolhido de forma que o tempo de atuação do relé tkt seja igual à soma do tempo de desaceleração do motor tT e o tempo correto de disparo do contator KM1.