Dispositivos de controle de velocidade do motor
Os motores elétricos assíncronos são amplamente utilizados em circuitos de freio de contracorrente. relé de controle de velocidade de indução... O eixo de entrada do relé 5, no qual um ímã permanente cilíndrico 4 está montado, é conectado ao eixo do motor elétrico, cuja velocidade angular deve ser controlada.
Quando o motor elétrico gira, o campo magnético atravessa os fios do curto-circuito 3 do estator rotativo 6. No enrolamento é induzida uma FEM, cujo valor é proporcional à velocidade angular de rotação do eixo. Sob sua influência, uma corrente aparece na bobina e surge uma força de interação, que tende a girar o estator 6 na direção de rotação do ímã.
A uma certa velocidade de rotação, a força aumenta tanto que o limitador 2, superando a resistência da mola plana, comuta os contatos do relé. O relé está equipado com dois nós de contato: 1 e 7, que são comutados dependendo do sentido de rotação.
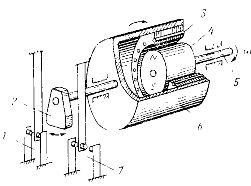
Figura 1. Relé de controle de velocidade indutivo
Um relé de controle de velocidade de indução tem um design bastante complexo e baixa precisão que só pode ser aceitável para sistemas de controle grosseiro. Maior precisão de regulação de velocidade pode ser alcançada usando um tacogerador - uma micromáquina de medição, cuja tensão nos terminais é diretamente proporcional à velocidade de rotação.
Os geradores de taco são usados em sistemas de realimentação de acionamento de velocidade variável com uma ampla faixa de rpm e, portanto, têm um erro de apenas alguns por cento. Os mais comuns são os tacogeradores DC.
Na fig. 2 mostra um diagrama de um relé de controle de velocidade para um motor elétrico M usando um tacogerador G, cujo circuito de armadura inclui um relé eletromagnético K e um reostato regulador R. Quando a tensão nos terminais da armadura do tacogerador excede a tensão operacional, o relé é ligado no circuito externo.
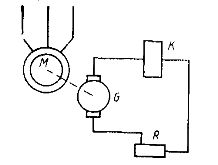
Figura 2. Relé de controle de velocidade com tacogerador
 Figura 3. Esquema de uma ponte de tacômetro
Figura 3. Esquema de uma ponte de tacômetro
À medida que a resistência do circuito de armadura aumenta, a precisão do circuito aumenta. Portanto, às vezes o relé é conectado ao tacogerador por meio de um amplificador semicondutor intermediário. Também é possível usar elementos de limite semicondutores sem contato com uma tensão de resposta estável para essa finalidade.
A confiabilidade do circuito pode ser melhorada se o tacogerador DC for substituído por um tacogerador assíncrono sem contato.
Um tacogerador assíncrono possui um rotor oco não magnético feito em forma de vidro. O estator possui dois enrolamentos em um ângulo de 90 ° entre si. Uma das bobinas está conectada a uma rede de corrente alternada.Uma tensão senoidal é removida do outro enrolamento, que é proporcional à velocidade do rotor. A frequência da tensão de saída é sempre igual à frequência da rede elétrica.
 Nos modernos motores DC Executive, o tacogerador é embutido na mesma carcaça da máquina e montado no mesmo eixo do motor principal. Isso reduz a ondulação da tensão de saída e melhora a precisão da regulação de velocidade.
Nos modernos motores DC Executive, o tacogerador é embutido na mesma carcaça da máquina e montado no mesmo eixo do motor principal. Isso reduz a ondulação da tensão de saída e melhora a precisão da regulação de velocidade.
Tacogeradores DC tipo PT-1 com excitação eletromagnética são comumente usados em motores elétricos da série PBST. Torque elevado motores DC Eu tenho um taco excitado de ímã permanente embutido.
Nos casos em que o motor DC M não possui tacogerador, sua velocidade pode ser controlada medindo a EMF da armadura. Para isso, é utilizado um circuito de ponte taquimétrica, que é formado por dois resistores: R1 e R2, armadura Ri e pólos adicionais da máquina Rdp. Tensão de saída da ponte do tacômetro Uout = U1 — Udp, ou
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
A última igualdade é válida sob a condição de que o fluxo magnético do motor elétrico seja constante. Incluindo um elemento de limite na saída da ponte tacométrica, é obtido um relé que é ajustado para uma determinada velocidade angular de rotação. A precisão da ponte do tacômetro é baixa devido à variabilidade da resistência de contato da escova e ao desequilíbrio de aquecimento da resistência.
Se o motor CC estiver operando em uma característica artificial e uma grande resistência adicional for incluída na armadura, a função do relé de velocidade pode ser executada por um relé de tensão conectado aos terminais da armadura.
Tensão na armadura do motor elétrico Uja = E + IjaRja.
Como I = (U — E) / (Ri + Rext), obtemos Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, então o segundo termo pode ser desprezado e a tensão do terminal da armadura pode ser considerada diretamente proporcional à fem e à velocidade de rotação do motor.
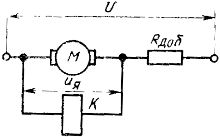
Figura 4. Controle de velocidade com relés de tensão
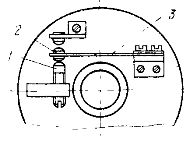 Figura 5. Relé de controle de velocidade centrífuga
Figura 5. Relé de controle de velocidade centrífuga
Eles têm um design muito simples. interruptores de velocidade centrífuga... A base do relé é uma placa frontal de plástico 4, montada em um eixo, cuja velocidade de rotação deve ser controlada. Na placa frontal é fixada uma mola plana 3 com um contato móvel maciço 2 e um contato fixo ajustável 1. A mola é feita de aço especial, cujo módulo de elasticidade é praticamente independente das mudanças de temperatura.
Quando a placa frontal gira, uma força centrífuga atua no contato móvel, que a uma certa velocidade de rotação supera a resistência da mola plana e comuta os contatos. A corrente é fornecida ao dispositivo de contato através de anéis coletores e escovas, não mostrados na figura. Tais relés são usados em sistemas de estabilização de velocidade para micromotores DC. Apesar de sua simplicidade, o sistema mantém a velocidade com um erro da ordem de 2%.
