Circuitos de controle automático para partida e parada de motores DC
 A partida de qualquer motor é acompanhada por certos interruptores no circuito de potência e no circuito de controle. Nesse caso, são usados dispositivos contator de relé e sem contato. Para motores DC para limitar correntes iniciais resistores de partida estão incluídos no circuito do rotor e da armadura dos motores, que são desligados quando os motores são acelerados em etapas. Quando a inicialização estiver concluída, os resistores de inicialização serão totalmente ignorados.
A partida de qualquer motor é acompanhada por certos interruptores no circuito de potência e no circuito de controle. Nesse caso, são usados dispositivos contator de relé e sem contato. Para motores DC para limitar correntes iniciais resistores de partida estão incluídos no circuito do rotor e da armadura dos motores, que são desligados quando os motores são acelerados em etapas. Quando a inicialização estiver concluída, os resistores de inicialização serão totalmente ignorados.
O processo de frenagem dos motores também pode ser automatizado. Após o comando de parada, com o auxílio do equipamento relé-contator, são feitas as comutações necessárias nos circuitos de potência. Ao se aproximar de uma velocidade próxima de zero, o motor é desconectado da rede. Durante a inicialização, as etapas são desativadas em intervalos regulares ou dependendo de outros parâmetros. Isso altera a corrente e a velocidade do motor.
O controle de partida do motor é executado em função de EMF (ou velocidade), corrente, tempo e caminho.
Subconjuntos e circuitos típicos para controle automático de partida de motores DC
A partida de um motor CC com excitação paralela ou independente é feita com um resistor introduzido no circuito da armadura. Um resistor é necessário para limitar a corrente de partida. À medida que o motor acelera, o resistor de partida é escalonado. Terminada a partida, o resistor será completamente desviado e o motor retornará às suas características mecânicas naturais (Fig. 1). Na partida, o motor acelera de acordo com a característica artificial 1, depois 2 e após manobrar o resistor - de acordo com a característica natural 3.
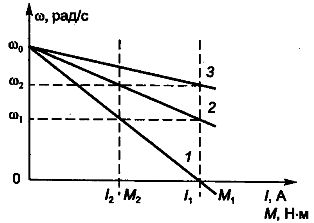
Arroz. 1. Características mecânicas e eletromecânicas de um motor CC com excitação paralela (ω — velocidade angular de rotação; I1 M1 — pico de corrente e torque do motor; I2 M2 — corrente e momento de comutação)
Considere o nó do circuito de partida do motor DC (DCM) na função EMF (Fig. 2).
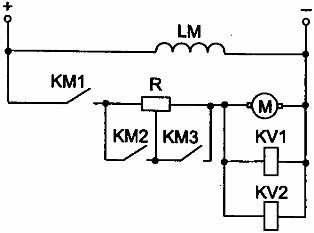
Arroz. 2. O nó do circuito inicial de DCT de excitação paralela na função EMF
A função EMF (ou velocidade) é controlada por relés, tensões e contatores. Os relés de tensão são configurados para operar em diferentes valores de fem de armadura. Quando o contator KM1 é ligado, a tensão do relé KV no momento da partida não é suficiente para operação. Quando o motor acelera (devido ao aumento da fem do motor), o relé KV1 é acionado, depois o KV2 (as tensões de acionamento do relé têm valores correspondentes); eles incluem os contatores de aceleração KM2, KMZ e os resistores no circuito da armadura são desviados (os circuitos de comutação do contator não são mostrados no diagrama; LM é o enrolamento de excitação).
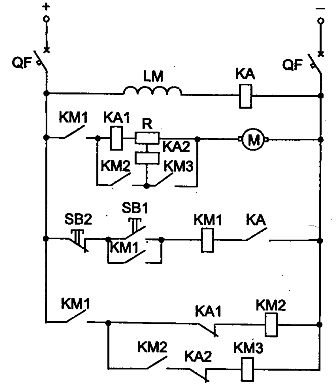
Vejamos o esquema para iniciar um motor DC na função EMF (Fig. 3). A velocidade angular do motor geralmente é fixada indiretamente, ou seja,grandezas de medição relacionadas com a velocidade. Para um motor DC, tal valor é o EMF. A partida é realizada da seguinte maneira. O disjuntor QF liga, o campo do motor é conectado à fonte de alimentação. O relé KA ativa e fecha seu contato.
Os demais dispositivos do circuito permanecem em sua posição original. Para ligar o motor, você deve aperte o botão SB1 «Start», após o qual o contator KM1 é ativado e conecta o motor à fonte de alimentação. O contator KM1 é autoalimentado. O motor CC é acelerado com o resistor R do circuito de armadura do motor.
À medida que a velocidade do motor aumenta, sua fem e a tensão nas bobinas dos relés KV1 e KV2 aumentam. Na velocidade ω1 (ver Fig. 1.) o relé KV1 é ativado. Ele fecha seu contato no circuito do contator KM2, que desarma e causa um curto-circuito no primeiro estágio do resistor de partida com seu contato. Na velocidade ω2, o relé KV2 é energizado. Com seu contato fecha o circuito de alimentação do contator KMZ, que ao ser acionado, com um contato, curto-circuita o segundo estágio de partida do resistor de partida. O motor atinge suas características mecânicas naturais e encerra a decolagem.
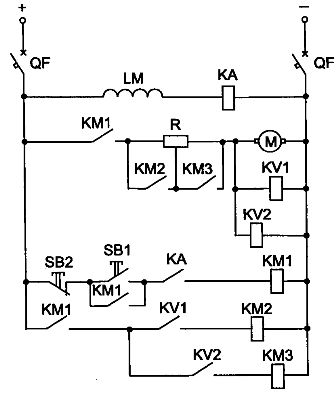
Arroz. 3. Esquema do início da DCT de excitação paralela na função EMF
Para o correto funcionamento do circuito, é necessário programar o relé de tensão KV1 para operar na FEM correspondente à velocidade ω1 e o relé KV2 para operar na velocidade ω2.
Para parar o motor, pressione o botão Stop SB2. Para desconectar o circuito elétrico, abra o disjuntor QF.
A função atual é controlada por um relé atual. Considere o nó do circuito de partida do motor CC na função de fluxo. No diagrama mostrado na fig.4, são usados relés de sobrecorrente, que aumentam na corrente de inrush I1 e descem na corrente mínima I2 (ver Fig. 1). O tempo de resposta interno dos relés de corrente deve ser menor que o tempo de resposta do contator.
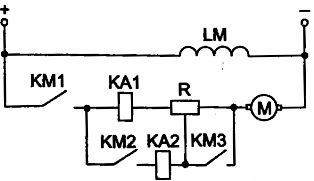
Arroz. 4. O nó do circuito inicial da DCT de excitação paralela, dependendo da corrente
A aceleração do motor começa com o resistor totalmente inserido no circuito da armadura. À medida que o motor acelera, a corrente diminui, com a corrente I2, o relé KA1 desaparece e com seu contato fecha o circuito de alimentação do contator KM2, que desvia o primeiro contato do resistor de partida com seu contato. Da mesma forma, o segundo estágio inicial do resistor está em curto-circuito (relé KA2, contator KMZ). Os circuitos de alimentação do contator não são mostrados no diagrama. Ao final da partida do motor, o resistor no circuito da armadura será ligado em ponte.
Considere o circuito para partida de um motor DC como uma função de fluxo (Fig. 5). As resistências das etapas do resistor são selecionadas de forma que, no momento em que o motor é ligado e as etapas são desviadas, a corrente I1 no circuito da armadura e o momento M1 não excedam o nível permitido.
Iniciando um motor DC é realizada ligando o disjuntor QF e pressionando o botão «Iniciar» SB1. Neste caso, o contator KM1 é acionado e fecha seus contatos. A corrente de partida I1 passa pelo circuito de potência do motor, sob a influência da qual o relé de sobrecorrente KA1 é ativado. Seu contato abre e o contator KM2 não recebe energia.
Arroz. 5. Esquema de inicialização DCT de excitação paralela em função da corrente
Quando a corrente cai para o valor mínimo I2, o relé de sobrecorrente KA1 cai e fecha seu contato.O contator KM2 é ativado e através de seu contato principal desvia a primeira seção do resistor de partida e o relé KA1. Ao comutar, a corrente sobe para o valor I1.
Quando a corrente aumenta novamente para o valor de I1, o contator KM1 não liga, pois sua bobina é desviada pelo contato KM2. Sob a influência da corrente I1, o relé KA2 é ativado e abre seu contato. Quando no processo de aceleração a corrente cai novamente para o valor de I2, o relé KA2 cai e o contator KMZ liga. A partida está completa, o motor opera com suas características mecânicas naturais.
Para o correto funcionamento do circuito, é necessário que o tempo de resposta dos relés KA1 e KA2 seja menor que o tempo de resposta dos contatores. Para parar o motor, pressione o botão «Stop» SB2 e desligue o disjuntor QF para desconectar o circuito.
O controle de tempo é realizado usando um relé de tempo e contatores correspondentes que curto-circuitam os estágios do resistor com seus contatos.
Considere o nó do circuito de partida motor DC em função do tempo (Fig. 6) O relé de tempo KT é acionado imediatamente quando surge tensão no circuito de controle através do contato de abertura KM1. Depois de abrir o contato KM1, o relé de tempo KT perde sua alimentação e fecha seu contato com um atraso de tempo. O contator KM2 após um intervalo de tempo igual ao atraso do relé de tempo recebe energia, fecha seu contato e desvia a resistência no circuito da armadura.
Arroz. 6. O nó do circuito de partida DCT de excitação paralela em função do tempo
As vantagens do controle em função do tempo incluem facilidade de controle, estabilidade do processo de aceleração e desaceleração, ausência de atraso do acionamento elétrico em velocidades intermediárias.
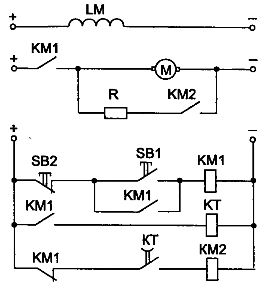
Considere o circuito para iniciar a excitação paralela de um motor CC em função do tempo. Na fig. 7 mostra um diagrama de um motor de excitação paralela CC de partida irreversível. O lançamento ocorre em duas etapas. O circuito usa os botões SB1 «Start» e SB2 «Stop», contatores KM1 ... KMZ, relés de tempo eletromagnéticos KT1, KT2. O disjuntor QF liga. Nesse caso, a bobina do relé de tempo KT1 recebe energia e abre seu contato no circuito do contator KM2. O motor é ligado pressionando o botão «Start» SB1. O contator KM1 recebe energia e com seu contato principal conecta o motor a uma fonte de energia com um resistor no circuito da armadura.
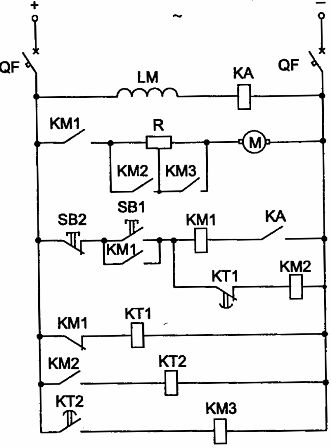
Arroz. 7. Esquema de partida irreversível de um motor DC em função do tempo
O relé de subcorrente KA serve para proteger o motor da interrupção do circuito de excitação. Durante a operação normal, o relé KA energiza e seu contato no circuito do contator KM1 fecha, preparando o contator KM1 para operação. Quando o circuito de excitação é interrompido, o relé KA desliga, abre seu contato, o contator KM1 desliga e o motor para. Quando o contator KM1 é acionado, seu contato de bloqueio fecha e o contato KM1 no circuito do relé KT1 abre, que desliga e fecha seu contato com um atraso de tempo.
Após um intervalo de tempo igual ao tempo de atraso do relé KT1, o circuito de alimentação do contator de aceleração KM2 é fechado, o qual é acionado e com seu contato principal curto-circuita um estágio do resistor de partida. Ao mesmo tempo, o relé de tempo KT2 é energizado. O motor acelera. Após um intervalo de tempo igual ao atraso do relé KT2, o contato KT2 fecha, o contator de aceleração KMZ é ativado e com seu contato principal entra em contato com o segundo estágio do resistor de partida no circuito da armadura. A partida é concluída e o motor retorna às suas características mecânicas naturais.
Unidades de circuito de controle de freio CC típicas
Os sistemas de controle automático do motor DC usam frenagem dinâmica, frenagem oposta e frenagem regenerativa.
Na frenagem dinâmica, é necessário fechar o enrolamento de armadura do motor a uma resistência adicional e deixar o enrolamento de excitação energizado. Essa frenagem pode ser feita em função da velocidade e em função do tempo.
O controle em função da velocidade (EMF) durante a frenagem dinâmica pode ser feito de acordo com o esquema mostrado na fig. 8. Quando o contator KM1 é desligado, a armadura do motor é desconectada da rede elétrica, mas há tensão em seus terminais no momento do desligamento. O relé de tensão KV opera e fecha seu contato no circuito do contator KM2, que com seu contato fecha a armadura do motor ao resistor R.
Em velocidades próximas a zero, o relé KV perde energia. A desaceleração adicional da velocidade mínima até a parada total ocorre sob a ação de um momento estático de resistência.Para aumentar a eficiência de frenagem, dois ou três estágios de frenagem podem ser aplicados.
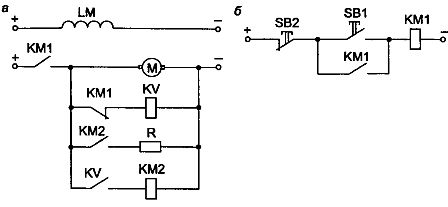
Arroz. 8. Nó do circuito de controle automático da frenagem dinâmica na função EMF: a — circuito de potência; b - circuito de controle
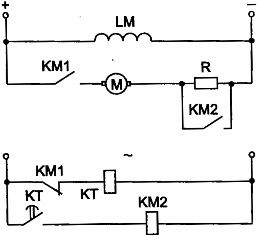
A excitação independente do motor constante de frenagem dinâmica em função do tempo é realizada de acordo com o esquema mostrado na fig. nove.
Arroz. 9. Nó do circuito de frenagem dinâmica DCT de excitação independente em função do tempo
Quando o motor está funcionando, o relé de tempo KT está ligado, mas o circuito do contator do freio KM2 está aberto. Para parar, você deve pressionar o botão "Stop" SB2. O contator KM1 e o relé de tempo KT perdem energia; o contator KM2 é ativado porque o contato KM1 no circuito do contator KM2 fecha e o contato do relé de tempo KT abre com um atraso de tempo.
Para a temporização do relé de tempo, o contator KM2 recebe energia, fecha seu contato e conecta a armadura do motor ao resistor adicional R. É realizada uma parada dinâmica do motor. Ao final, o relé KT, após algum tempo, abre seu contato e desconecta o contator KM2 da rede. A frenagem adicional até a parada completa é realizada sob a influência do momento de resistência Ms.
Na frenagem de ação reversa, o EMF do motor e a tensão de rede atuam de acordo. Para limitar a corrente, um resistor é inserido no circuito.
Controle de excitação de motores DC
O enrolamento de campo do motor tem uma indutância significativa e se o motor for desligado rapidamente, pode aparecer uma grande tensão nele, o que causará a quebra do isolamento do enrolamento. Para evitar isso, você pode usar os nós do circuito mostrados na fig.10. A resistência de extinção é ligada em paralelo com a bobina de excitação através do diodo (Fig. 10, b). Portanto, após o desligamento, a corrente passa pela resistência por um curto período de tempo (Fig. 10, a).

Arroz. 10. Nós de circuitos para ligar as resistências de extinção: a — a resistência de extinção é conectada em paralelo; b — a resistência de extinção é ligada através do diodo.
A proteção contra interrupção do circuito de excitação é realizada usando um relé de subcorrente de acordo com o esquema mostrado na fig. onze.

Arroz. 11. Proteção contra interrupção do circuito de excitação: a — circuito de excitação de potência; b - circuito de controle
Em caso de interrupção da bobina de excitação, o relé KA desenergiza e desliga o circuito do contator KM.