Iniciando um motor de rotor bobinado
As propriedades de partida do motor assíncrono dependem das características de seu projeto, em particular do dispositivo do rotor.
A partida de um motor de indução é acompanhada por um processo transiente da máquina, associado à passagem do rotor de um estado de repouso para um estado de rotação uniforme, no qual o torque do motor equilibra o momento das forças de resistência sobre o eixo da máquina.
Ao dar a partida em um motor assíncrono, há um aumento no consumo de energia elétrica da rede de alimentação, que é gasta não apenas para superar o torque de frenagem aplicado ao eixo e cobrir as perdas no próprio motor assíncrono, mas também para comunicar uma certa cinética energia para os elos móveis da unidade de produção. Portanto, ao dar a partida, o motor de indução deve desenvolver um torque aumentado.
Para um motor de indução com rotor, o torque de partida correspondente ao escorregamento com n = 1 depende das resistências ativas dos resistores ajustáveis introduzidos no circuito do rotor.
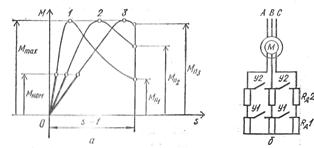
Arroz. 1.Iniciando um motor assíncrono trifásico com um rotor bobinado: a - gráficos da dependência do torque de um motor com um rotor bobinado devido ao escorregamento em várias resistências ativas de resistores no circuito do rotor, b - um circuito para conectar resistores e fechar contatos para aceleração para o circuito do rotor.
Portanto, com contatos de aceleração fechados U1, U2, ou seja, ao iniciar um motor de indução com um curto-circuito de anéis coletores, o torque de partida inicial Mn1 = (0,5 -1,0) Mnom e a corrente de partida inicial Azn = ( 4,5 - 7) Aznom e outros.
Um pequeno torque de partida de um motor elétrico assíncrono com rotor enrolado pode ser insuficiente para acionar uma unidade de produção e sua subsequente aceleração, e uma corrente de partida significativa levará ao aumento do aquecimento dos enrolamentos do motor, o que limita sua frequência de comutação e em redes com baixa potência leva a uma queda de tensão temporária indesejável para a operação de outros receptores. Essas circunstâncias podem ser a razão que impede o uso de motores de indução de rotor bobinado com grande corrente de partida para acionar mecanismos de trabalho.

A introdução de resistores ajustáveis no circuito do rotor do motor, chamados resistores de partida, não só reduz a corrente inicial de partida, mas ao mesmo tempo aumenta o torque inicial de partida, que pode atingir o torque máximo Mmax (origem 1, a, curva 3), se o escorregamento crítico do motor do rotor faseado
skr = (R2' + Rd') / (X1 + X2′) = 1,
onde Rd' — resistência ativa do resistor na fase do enrolamento do rotor do motor, reduzida à fase do enrolamento do estator.Aumentar ainda mais a resistência ativa do resistor de partida é impraticável, pois leva ao enfraquecimento do torque de partida inicial e à saída do ponto de torque máximo na região de escorregamento s> 1, o que exclui a possibilidade de acelerar o rotor.
A resistência ativa necessária dos resistores para iniciar um motor de rotor de fase é determinada com base nos requisitos de partida, que podem ser leves quando Mn = (0,1 — 0,4) Mnom, normal se Mn — (0,5 — 0,75) Mn e severo em Mn ≥ I.
Para manter um torque suficientemente grande com um motor de rotor de fase durante a aceleração de uma unidade de produção, para reduzir a duração do processo transitório e reduzir o aquecimento do motor, é necessário reduzir gradualmente a resistência ativa dos resistores de partida. Mudança admissível de torque durante a aceleração M (t) determinada por condições elétricas e mecânicas que limitam o limite de pico de torque M> 0,85Mmax, o momento de comutação M2 >> Ms (Fig. 2), bem como a aceleração.

Arroz. 2. Características de partida de um motor assíncrono trifásico com rotor bobinado

A inclusão dos resistores de partida é garantida pela inclusão sucessiva dos aceleradores Y1, Y2, respectivamente, nos tempos t1, t2, contados a partir do momento da partida do motor, quando durante a aceleração o torque M torna-se igual ao momento de comutação M2. Portanto, durante toda a partida, todos os torques de pico são os mesmos e todos os torques de comutação são iguais entre si.
Como o torque e a corrente do motor assíncrono com um rotor bobinado estão mutuamente relacionados, é possível definir o limite de corrente de pico durante a aceleração do rotor I1 = (1,5 - 2,5) Aznom e a corrente de comutação Az2, o que deve garantir o momento de comutação M2 > M.°C.
A desconexão de motores assíncronos com rotor bobinado da rede de alimentação é sempre realizada com um curto-circuito do circuito do rotor para evitar o aparecimento de sobretensões nas fases do enrolamento do estator, que podem exceder a tensão nominal dessas fases por 3 — 4 vezes, se o circuito do rotor estiver aberto no momento em que o motor parar.
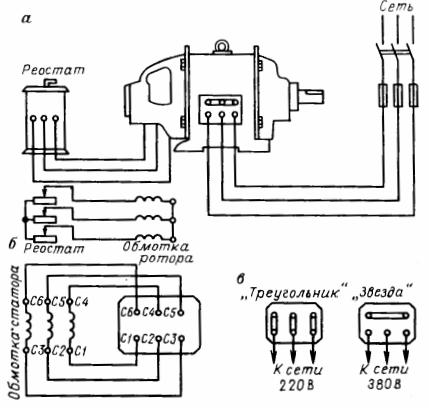
Arroz. 3. Esquema de conexão dos enrolamentos do motor com um rotor de fase: a — à rede elétrica, b — rotor, c — na placa de terminais.
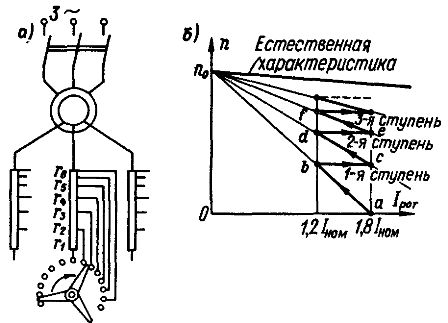
Arroz. 4. Partida do motor com rotor de fase: a — circuito de comutação, b — características mecânicas