Motores CC executivos e tacogeradores
motores executivos DC
 Os atuadores de corrente contínua são máquinas de baixa potência utilizadas em automação e telemecânica, em sistemas de controle automático, regulação e controle de instalações automatizadas, onde convertem o sinal elétrico de um dispositivo de medição - uma tensão de controle - em um movimento angular de um eixo para afetar de aparelhos de controle, regulação ou controle... Nos casos em que o sinal de entrada é insuficiente para acionar o motor de acionamento, um amplificador de potência magnético ou semicondutor é usado.
Os atuadores de corrente contínua são máquinas de baixa potência utilizadas em automação e telemecânica, em sistemas de controle automático, regulação e controle de instalações automatizadas, onde convertem o sinal elétrico de um dispositivo de medição - uma tensão de controle - em um movimento angular de um eixo para afetar de aparelhos de controle, regulação ou controle... Nos casos em que o sinal de entrada é insuficiente para acionar o motor de acionamento, um amplificador de potência magnético ou semicondutor é usado.
Os motores de acionamento normalmente operam com partidas, paradas e reversões frequentes. Eles apresentam torque e velocidade de partida significativos. Na maioria dos casos, as dependências do torque e velocidade da armadura na tensão de controle são quase lineares.
 Dependendo do sistema de alimentação dos circuitos elétricos, é feita uma distinção entre motores de acionamento controlados por armadura e controlados por polo.No controle de armadura, o enrolamento de controle é o enrolamento de armadura em conexão com o qual a tensão de controle é fornecida aos seus terminais, e a corrente de excitação constante fornece uma fonte independente de energia elétrica de tensão constante. No caso do controle de pólo, a bobina de controle serve como a bobina de excitação do pólo primário e a tensão de controle é fornecida aos seus terminais, e a tensão do terminal de armadura definida por uma fonte de tensão CC independente permanece inalterada.
Dependendo do sistema de alimentação dos circuitos elétricos, é feita uma distinção entre motores de acionamento controlados por armadura e controlados por polo.No controle de armadura, o enrolamento de controle é o enrolamento de armadura em conexão com o qual a tensão de controle é fornecida aos seus terminais, e a corrente de excitação constante fornece uma fonte independente de energia elétrica de tensão constante. No caso do controle de pólo, a bobina de controle serve como a bobina de excitação do pólo primário e a tensão de controle é fornecida aos seus terminais, e a tensão do terminal de armadura definida por uma fonte de tensão CC independente permanece inalterada.
A direção de âncora é geralmente usada. A inversão da polaridade da tensão de controle faz com que a armadura gire na direção oposta.
Os motores DC executivos são fabricados com potências nominais de uma fração de watt a 600 W de projetos normais e especiais.
 Os motores de projeto normal são semelhantes às máquinas de corrente contínua para uso geral, mas diferem delas porque a carcaça com os pólos principais, como a armadura, é montada a partir de chapas finas de aço elétrico isoladas umas das outras, o que melhora as propriedades dessas máquinas em condições transitórias. Além disso, não há polos adicionais nessas máquinas, pois a reação da armadura é pequena e os processos de comutação são totalmente satisfatórios. Como a velocidade da armadura é baixa, não há ventilador no eixo desses motores.
Os motores de projeto normal são semelhantes às máquinas de corrente contínua para uso geral, mas diferem delas porque a carcaça com os pólos principais, como a armadura, é montada a partir de chapas finas de aço elétrico isoladas umas das outras, o que melhora as propriedades dessas máquinas em condições transitórias. Além disso, não há polos adicionais nessas máquinas, pois a reação da armadura é pequena e os processos de comutação são totalmente satisfatórios. Como a velocidade da armadura é baixa, não há ventilador no eixo desses motores.
Os motores de design especial incluem máquinas magnetoelétricas com excitação do campo magnético principal usando ímãs permanentes, bem como máquinas de baixa inércia que diferem no design da armadura.Estes últimos incluem: motores com uma armadura não magnética oca - um cilindro plástico oco de parede fina com uma bobina prensada de fio de cobre com um circuito magnético ferromagnético fixo interno montado em uma blindagem de rolamento e motores menos duráveis com uma armadura de disco - um disco fino não magnético feito de cerâmica, textolite , vidro e às vezes alumínio com uma bobina impressa, que é um conjunto de fios de folha de cobre, localizados radialmente em ambos os lados do disco, sobre os quais deslizam escovas de grafite de prata. Os designs mencionados são caracterizados por um baixo momento de inércia da armadura, o que proporciona alta velocidade do motor executivo.

A massa dos motores executivos de corrente contínua é 2 - 4 vezes menor que a massa dos motores executivos assíncronos com a mesma potência nominal, e sua eficiência na potência nominal 5 ... 10 W é de cerca de 0,3 e atinge um valor de 0,65 e um pouco maior para motores com potência nominal de 200 — 300 W.

tacogeradores DC
 Os tacogeradores CC são máquinas de baixa potência projetadas para converter um valor mecânico em um sinal elétrico - uma tensão de saída. Em particular, eles são usados para controlar e medir a velocidade do eixo de acionamento ao qual o eixo do tacogerador está conectado, cujas braçadeiras de armadura são conectadas ao dispositivo de medição. Além disso, os tacogeradores são usados em dispositivos de computação eletromecânica para realizar operações computacionais, bem como em dispositivos para processamento automático de sinais de aceleração e amortecimento gerados.
Os tacogeradores CC são máquinas de baixa potência projetadas para converter um valor mecânico em um sinal elétrico - uma tensão de saída. Em particular, eles são usados para controlar e medir a velocidade do eixo de acionamento ao qual o eixo do tacogerador está conectado, cujas braçadeiras de armadura são conectadas ao dispositivo de medição. Além disso, os tacogeradores são usados em dispositivos de computação eletromecânica para realizar operações computacionais, bem como em dispositivos para processamento automático de sinais de aceleração e amortecimento gerados.
Os tacogeradores são magnetoelétricos com excitação do campo magnético principal por meio de ímãs permanentes e eletrodinâmicos com excitação eletromagnética devido ao campo magnético. bobina de excitação alimentada por uma fonte de tensão CC independente.
A tensão de saída do tacogerador no modo inativo varia linearmente com a velocidade da armadura e, sob carga, essa linearidade é um pouco perturbada e, quanto mais, menor a resistência do dispositivo de medição conectado aos grampos da armadura. No entanto, para qualquer tacogerador, existe uma faixa relativamente pequena de velocidades medidas dentro das quais, dada uma resistência suficientemente grande do dispositivo de medição e condições de circuito de excitação constante, a característica de saída pode ser considerada praticamente linear.
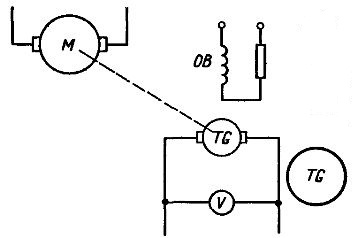
Esquema de inclusão de um tacogerador de corrente contínua de excitação independente
 Uma desvantagem significativa dos tacogeradores DC é a flutuação da tensão de saída devido a uma ligeira mudança periódica no fluxo magnético devido ao entreferro desigual e à condutividade desigual da armadura em diferentes direções radiais, incluindo aquelas causadas pela estrutura do dente de sua circuito magnético, bem como devido às vibrações das escovas, rugosidade e elipticidade do coletor e processos de comutação - amplamente eliminados em um tacogerador de armadura oca, que é projetado da mesma forma que um motor executivo DC de baixa inércia com um armadura semelhante.
Uma desvantagem significativa dos tacogeradores DC é a flutuação da tensão de saída devido a uma ligeira mudança periódica no fluxo magnético devido ao entreferro desigual e à condutividade desigual da armadura em diferentes direções radiais, incluindo aquelas causadas pela estrutura do dente de sua circuito magnético, bem como devido às vibrações das escovas, rugosidade e elipticidade do coletor e processos de comutação - amplamente eliminados em um tacogerador de armadura oca, que é projetado da mesma forma que um motor executivo DC de baixa inércia com um armadura semelhante.
A imprecisão da instalação das escovas na neutralidade geométrica do coletor do tacômetro leva à assimetria da tensão de saída, ou seja,para gerar duas tensões diferentes no enrolamento da armadura em direções opostas de sua rotação na mesma velocidade. Com a disposição correta das escovas, a assimetria de tensão fica na faixa de 0,3 a 1% da tensão nominal do tacogerador.