Sensores sem contato para a posição dos mecanismos
 Neste artigo falaremos sobre sensores de posição de mecanismos. Basicamente, a principal função de qualquer sensor é dar um sinal quando ocorre um evento específico. Ou seja, quando ocorre um evento de disparo, o sensor é acionado e gera um sinal, que pode ser analógico ou discreto, digital.
Neste artigo falaremos sobre sensores de posição de mecanismos. Basicamente, a principal função de qualquer sensor é dar um sinal quando ocorre um evento específico. Ou seja, quando ocorre um evento de disparo, o sensor é acionado e gera um sinal, que pode ser analógico ou discreto, digital.
Os sensores de limite têm sido usados como sensores de posição por muitas décadas. comuta. Eles consistem em contatos elétricos que abrem ou fecham mecanicamente quando alguma variável (posição) atinge um determinado valor. Os interruptores de limite de vários tipos são uma parte importante de muitos sistemas de controle, cuja confiabilidade depende deles. tais sensores contêm elementos mecânicos móveis cujos recursos são limitados.
Os interruptores de limite estão sendo substituídos ativamente por vários sensores de proximidade. Na maioria das vezes, sensores de proximidade dos seguintes tipos: indutivo, gerador, magnetohercon e fotoeletrônica. Esses sensores não têm contato mecânico com o objeto em movimento cuja posição está sendo monitorada.
Os sensores de posição sem contato garantem alta velocidade e alta frequência de ativação do mecanismo. Uma certa desvantagem desses sensores é a dependência, sua precisão, de mudanças na tensão de alimentação e temperatura. Dependendo dos requisitos, o dispositivo de saída desses dispositivos pode ser o seguinte elemento lógico sem contatoe relé elétrico.
Em esquemas de frenagem de precisão de acionamentos elétricos, sensores de proximidade podem ser usados tanto para comandar uma redução de marcha quanto uma parada final.
Existem muitos tipos de sensores no mercado hoje, mas no âmbito deste artigo vamos destacar o tópico sensores de posição indutivos diretamente, já que em mais de 80% dos casos são os sensores indutivos que servem como sensores para a posição dos mecanismos.
O sensor indutivo é acionado quando o metal se aproxima de sua zona de disparo. Por esta razão, os sensores de posição indutivos também são chamados de sensores de presença, sensores de proximidade ou simplesmente interruptores indutivos.
Vamos agora considerar o princípio de operação de um sensor indutivo. Conforme mencionado acima, quando o metal está próximo o suficiente da zona de disparo, o sensor é ativado. Esse fenômeno consiste na interação dos envolvidos indutores com o metal se aproximando, o que altera drasticamente a magnitude do campo magnético da bobina, o que leva à ativação do sensor, ele é acionado, o sinal correspondente aparece em sua saída.
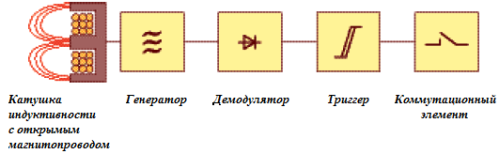
A parte eletrônica do dispositivo contém um circuito de controle, que por sua vez controla um relé ou chave de transistor. É composto pelas seguintes partes:
-
Um gerador que cria um campo eletromagnético necessário para interagir com um objeto.
-
Gatilho Schmitt fornecendo histerese de comutação.
-
Um amplificador para aumentar a amplitude do sinal para que atinja o valor de atuação necessário.
-
LED indicador informando sobre o status do interruptor. Ele também fornece monitoramento e configuração de desempenho.
-
Composto para proteger contra a penetração de partículas sólidas e água.
-
Carcaça para montagem do sensor e proteção contra diversas influências mecânicas, é fabricada em latão ou poliamida e possui acabamento com fixadores.
Sensores de posição indutivos são amplamente utilizados em sistemas de automação industrial onde é necessário determinar periodicamente ou constantemente a posição de qualquer parte do mecanismo. O sensor gera um sinal que é enviado ao drive. Uma partida, controlador, relé, conversor de frequência, etc. podem atuar como um mecanismo executivo. O principal é que os parâmetros do sensor correspondam aos parâmetros do drive em termos de tensão e corrente.
A maioria dos sensores não são dispositivos de energia, são principalmente dispositivos de sinalização; à comutação de energia.
Os sensores de posição indutivos modernos são encontrados com mais frequência em duas versões de caixas de plástico ou metal: retangulares ou cilíndricas. O diâmetro do sensor com seção transversal circular pode ser de 4 a 30 mm, mas os diâmetros mais usados são 18 e 12 mm.
Quando o sensor é montado no equipamento, é definido um espaço entre a placa de metal e a zona de atuação do sensor, geralmente essa distância não excede o diâmetro do sensor e, via de regra, acaba sendo 2 a 3 vezes menor que seu diâmetro.
De acordo com o método de conexão, os sensores de posição indutivos podem ser de dois fios, três fios, quatro fios e cinco fios.
Dois fios comutam diretamente a carga, como bobina de partida, ou seja, funcionam como um switch convencional. Os sensores de dois fios requerem resistência de carga, portanto nem sempre são adequados como uma ferramenta confiável, mas não perdem sua relevância.
A carga é simplesmente conectada em série com o sensor, se for usada tensão constante então é importante observar a polaridade, se a polaridade alternada não for importante, o principal é a potência e corrente comutadas.
Os sensores de três fios têm um terceiro fio para alimentar o próprio sensor, e esta é a solução mais popular. Os sensores de quatro e cinco fios possuem saídas de transistor ou relé para conectar a carga, e o quinto fio permite selecionar o modo de operação do sensor, o estado inicial das saídas.
Como as saídas podem ser relé e transistor, os sensores são divididos em três tipos de acordo com o dispositivo das saídas: relé, npn e pnp.
Sensores com saída de relé
Um sensor com uma saída de relé possui isolamento galvânico do circuito de alimentação do circuito incluído. Ele comuta um fio e a tensão no circuito comutado não é particularmente crítica. Como o circuito de alimentação do sensor é isolado galvanicamente, isso pode ser considerado uma vantagem do sensor de relé. Sensores desse tipo geralmente são grandes.
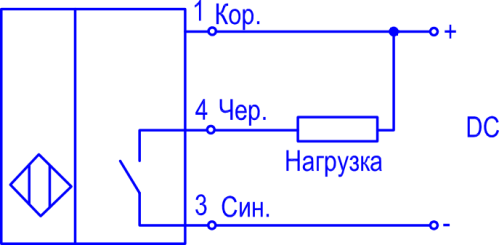
Sensores com saída de transistor pnp
O sensor possui um transistor pnp na saída que comuta o fio positivo com a carga. Uma carga é conectada ao circuito coletor do transistor pnp de saída, que está permanentemente conectado ao negativo através de seu segundo condutor.
Sensores com saída de transistor npn
O sensor possui um transistor NPN na saída que comuta o fio negativo com a carga. Uma carga é conectada ao circuito coletor do transistor npn de saída, que é permanentemente conectado por seu segundo condutor ao condutor positivo.
De acordo com o estado inicial das saídas, os sensores de posição indutivos podem ser contatos normalmente fechados ou normalmente abertos. O estado inicial significa que este estado está no momento em que o sensor ainda não está acionado, ou seja, não está ativado.
Se os contatos de saída estiverem normalmente fechados, a carga é conectada em tempo ocioso, se estiver normalmente aberto, até que o sensor seja acionado, a carga será cortada e nenhuma energia será fornecida ao inversor (por exemplo, contator). Os contatos normalmente fechados são designados no formato inglês — N.C. (Normalmente Fechado), Normalmente Aberto — N.O. (Normalmente aberto).
Assim, sensores com saídas a transistor são de quatro tipos: dois tipos de acordo com a condutividade (pnp ou npn) e dois tipos de acordo com o estado inicial das saídas. Também pode haver um atraso ao ligar ou desligar.

Dependendo do tipo de inversor conectado ao sensor, bem como do método de alimentação, a lógica do sensor pode ser positiva ou negativa. Isso se deve ao nível de tensão que ativa a entrada do dispositivo.
Se a entrada for ativada quando o fio negativo do atuador estiver conectado ao terra, ao menos, então a lógica é chamada negativa, tal conexão é característica de sensores com saídas de transistor do tipo npn.
A lógica positiva corresponde a conectar o fio positivo do drive ao positivo da fonte de alimentação quando ativado, esta lógica é típica de sensores com saídas de transistor pnp. Na maioria das vezes, há uma lógica positiva para a operação de sensores indutivos para a posição dos mecanismos.
Tipos mais antigos de sensores de posição indutivos mais usados
Sensores de posição indutivos IKV-22
Sensores indutivos IKV-22. A operação desses sensores é baseada no princípio de alterar a resistência indutiva de bobinas com núcleo de aço quando o entreferro no circuito magnético muda.
Um circuito magnético com duas bobinas é montado sobre uma placa de aço, fechada com uma tampa de plástico. Dois capacitores MBGP (um com capacidade de 15 μF, 200 V, o outro com capacidade de 10 μF, 400 V) são fixados na placa pelo lado inferior. Os capacitores são cobertos com uma tampa. O cabo é conectado através do selo. Um shunt magnético é instalado no mecanismo, cujas dimensões devem ser de pelo menos: espessura 2 mm, largura 80 mm, comprimento 140 mm. O entreferro entre o circuito magnético e o shunt é de 6 ± 4 mm.
O relé de saída geralmente é ligado e desligado no momento em que o shunt magnético passa pelo sensor, quando devido a uma mudança na resistência indutiva da bobina, ocorre ressonância de corrente e a corrente através da bobina do relé cai. Esses relés: tipo MKU-48, 12 V CA, corrente de consumo não superior a 0,45 A, queda de corrente não inferior a 0,1 A.A tensão de alimentação do circuito do sensor é um relé de 24 V CA.
Sensores de posição indutivos ID-5
Nas oficinas metalúrgicas, são utilizados sensores indutivos do tipo ID-5, projetados para trabalhar em temperaturas ambientes de até + 80 ° C e umidade de até 100%. Poeira condutiva e incrustações são aceitáveis. Um amplificador de saída de semicondutor tipo UID-10 é usado com o sensor. A potência de saída do amplificador (25 W) é suficiente para ligar os relés REV-800, contatores KP21, MK-1, etc.
O espaço de ar entre o sensor e o objeto ferromagnético observado pode ser de até 30 mm. As dimensões do sensor ID-5 são 187x170x70 mm, a tensão de alimentação é 220 V ± 15%, 50 Hz.
Interruptores sem contato BSP de tamanho pequeno
Chaves de movimento pequenas BSP-2 (com saída sem contato, para elemento lógico) e BRP (com saída para relé PE-21, 24 V, 16 Ohm) são usadas em máquinas de corte de metal.
A chave BSP-2 consiste em um sensor de transformador diferencial e um gatilho de semicondutor. O sistema magnético da primeira bobina do sensor é movido por uma placa de aço, e a segunda bobina é manipulada à medida que se move sobre seu sistema magnético conectado ao mecanismo de armadura plana. As bobinas são ligadas na direção oposta.
Se a armadura estiver acima do sensor, as reatâncias indutivas das bobinas são iguais e a saída do sensor do transformador diferencial é zero. Nesse caso, uma tensão de pelo menos 2,5 V aparece na saída do gatilho, o que é suficiente para o funcionamento do elemento lógico.
Na ausência de uma armadura acima do sensor, uma tensão é aplicada ao gatilho, que o retorna ao seu estado original. Então o sinal de saída do interruptor é zero.
O princípio de operação da chave BRP é em muitos aspectos semelhante ao da BSP-2.Um sensor indutivo (de acordo com o circuito do transformador diferencial), um gatilho e um amplificador são instalados dentro da caixa. As bobinas secundárias com um número diferente de voltas são ligadas na direção oposta. Como a armadura se sobrepõe ao sistema magnético do sensor, o sinal diminui e após a mudança de fase, o gatilho é acionado e um relé de saída externo (PE-21, 24 V, 16 Ohm) é acionado.
A âncora fixada ao mecanismo tem dimensões de 80x15x3 mm. A folga entre a âncora e o sensor é de 4 mm. A precisão dos interruptores no modo nominal é de ± 0,5 mm, o diferencial de atuação não é superior a 5 mm. No. flutuações na tensão de alimentação e temperatura, o erro dos interruptores BSP-2 e BRP pode atingir ± (2,5-f-3,0) mm.
Sensores indutivos de alta frequência VKB
Sensores indutivos de alta precisão do tipo VKB com armadura em forma de U ou plana também são usados para a automação de máquinas de corte de metal. Os polos do transformador embutido formam um sistema eletromagnético aberto. A folga de ar de trabalho é de 0,1-0,15 mm.
A tensão de saída do enrolamento secundário do transformador é alimentada a um circuito de medição diferencial e, em seguida, a um amplificador de transistor. O erro total do sensor com flutuações de temperatura de 5 a 40 ° C e tensão de 85 a 110% do valor nominal é de ± (0,064-0,15) mm, a diferença na resposta não excede 0,4 mm. A velocidade máxima de movimento do mecanismo é de 10 m / mm. Dimensões do sensor 62x34x24 mm. Tensão de alimentação 12 V.
Tipos especiais de sensores indutivos de precisão para máquinas de corte de metal com circuito diferencial têm um erro inferior a ± 0,01 mm.Esses sensores incluem um interruptor de movimento sem contato do tipo VPB12, que consiste em uma unidade de sensor em uma unidade eletrônica. A unidade do sensor inclui um sensor de trabalho indutivo, um sensor de compensação indutivo e placas de circuito impresso. O mecanismo é montado: elemento de ferrite de controle. Tensão de alimentação 12 V DC. A distância máxima de exposição não é superior a 0,12 mm. Um relé tipo RPU-0 pode ser conectado à saída do sensor. A corrente de carga máxima do dispositivo de saída é 0,16 A.
Sensores de posição do gerador
Sensores deste tipo são compactos e muito precisos. Os geradores de sensores das séries KVD-6M e KVD-25 (com slots), KVP-8 e KVP-16 (aeronaves) provaram ser bons. Eles são adequados para uso em altas concentrações de umidade e poeira. Os elementos do circuito do transistor do sensor (gerador e gatilho) estão localizados em um invólucro feito de poliestireno resistente a choques. A vedação é feita com um composto de endurecimento a frio. A faixa de temperatura operacional é de - 30 a +50 ° C.
O sensor HPC gera um sinal discreto quando uma placa de metal («bandeira») passa pelo slot, causando uma falha na geração e comutação do gatilho. A largura do slot é de 6 mm para o sensor KVD-6M e 25 mm para o sensor KVD-25.
Os sensores KVP-8 e KVP-16 são acionados quando uma placa metálica passa por eles a uma distância máxima de 8 e 16 mm, respectivamente.