Como determinar o escorregamento do motor de indução durante a configuração e operação
Se a rotação do motor for significativamente diferente da sincronizadamente, é medido com um tacômetro ou tacogerador, que é conectado diretamente ao eixo do motor elétrico, e o escorregamento do motor é determinado pela fórmula S = (n1 — n2) / n1, onde n1 = 60f / p — síncrono freqüência de rotação; n2 é a velocidade real.
As vantagens deste método de determinação do escorregamento de um motor elétrico: a velocidade de medição e a capacidade de realizar velocidade constante e variável. As desvantagens desse método de medição incluem a baixa precisão dos tacômetros convencionais (erro de 1 a 8%) e a dificuldade de calibração. Além disso, o tacômetro não pode ser usado para testar motores elétricos de baixa potência, pois as perdas por atrito no mecanismo do tacômetro representam uma carga perceptível.
Para fazer várias medições, um tacômetro de mão geralmente é fornecido com um conjunto de pontas intercambiáveis de vários formatos e finalidades, que são colocadas na extremidade do rolo (Fig. 1). A mais utilizada dessas pontas é o cone de borracha, que é montado em um cartucho de metal. Todas essas pontas são usadas para entrar em contato com o recesso pontiagudo na extremidade do eixo da máquina elétrica. A ponta central de borracha é usada para altas frequências, a ponta de aço para baixas e médias frequências.
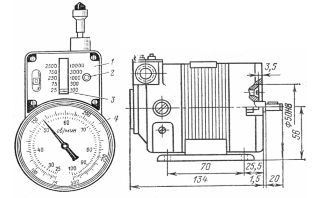 Arroz. 1. Visão geral de um tacômetro centrífugo tipo IO -10 e tacogerador: 1 — escala; 2 — botão de troca; 3 — indicador de limite; 4 - discar
Arroz. 1. Visão geral de um tacômetro centrífugo tipo IO -10 e tacogerador: 1 — escala; 2 — botão de troca; 3 — indicador de limite; 4 - discar
Se houver uma cavidade no centro do eixo, é utilizada uma extensão, que é colocada no eixo do tacômetro e a ponta correspondente na extensão. Na ausência ou insuficiência de centros, é utilizado um rolo, que é pressionado da superfície lateral (anel de borracha) para a superfície do eixo rotativo.
De acordo com as condições de medição específicas, selecione um acessório (ponta de extensão). Antes de iniciar a medição, remova graxa, sujeira, poeira do centro da ranhura ou da superfície do eixo.
Para medir a velocidade de rotação do motor elétrico, você deve primeiro definir o limite de medição necessário do tacômetro. Se a ordem de medição de frequência for desconhecida, a medição deve começar no limite mais alto para evitar danos ao tacômetro.
A medição deve ser realizada por um curto período de tempo (3 - 5 s) pressionando cuidadosamente a ponta do tacômetro contra o eixo giratório com leve pressão para que o eixo do eixo do tacômetro coincida com o eixo do eixo medido ou, quando usando o rolo, é paralelo a ele.

Se o deslizamento não exceder 5%, a velocidade pode ser medida pelo método estroboscópico usando uma lâmpada de néon.
Uma linha diametral é desenhada na extremidade do eixo do motor com giz. Enquanto o motor está funcionando, ele é iluminado por uma lâmpada neon alimentada por uma rede com a mesma frequência do motor. O observador vê no final do eixo não uma linha, mas uma estrela girando lentamente contra a direção de rotação do eixo. O número de raios da estrela depende do número de pólos do motor e da posição da lâmpada neon. Se a luz de ambos os eletrodos da lâmpada incide na extremidade do eixo, o número de raios da estrela visível é 2p. Se a extremidade do eixo com a linha de giz for iluminada por apenas um eletrodo, o número de raios de a estrela visível é igual ao número de pólos.
Durante o tempo t (geralmente 30 s) medido pelo cronômetro, é contado o número de raios da estrela visível m passando pela posição vertical. Como o número de raios da estrela visível é 2p, o deslizamento
onde f1 é a frequência da rede de alimentação de uma lâmpada neon.
Em f1 = 50 Hz.
Outra variante do método estroboscópico é a seguinte. Um dos discos é fixado no eixo do motor pela parte frontal (Fig. 2). Monte a corrente (fig. 3). Em uma máquina bipolar, um disco denominado 2p = 2 é fixado no eixo e iluminado por uma lâmpada de néon com um eletrodo de remendo.

Arroz. 2… Imagem dos discos estroboscópicos em função do número de pólos do motor de indução
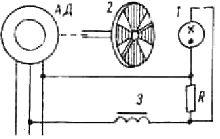
Arroz. 3… Esquema de comutação da lâmpada neon para método estroboscópico de detecção de escorregamento: 1 — lâmpada neon, 2 — disco estroboscópico, 3 — bobina de indução
O rotor gira de forma assíncrona e fica atrás do campo, então o disco é visto girando lentamente na direção oposta à rotação do rotor.Se durante o tempo t m setores pretos passarem por um ponto estacionário (uma seta fixada em um rumo), o valor do escorregamento é dado pela expressão
A contagem dos setores que passam por um ponto fixo não deve ser iniciada a partir do momento em que o cronômetro é acionado, mas a partir do próximo cruzamento da marca.
Para obter uma imagem nítida, uma voltagem deve ser aplicada à lâmpada, cuja curva é mostrada na fig. 4… A lâmpada acende quando a tensão em seus terminais atinge um valor chamado limite de ignição.
Arroz. 4... Esquema para ligar uma lâmpada de néon para obter uma forma de onda com uma tensão acentuada: 1 — lâmpada de néon; 2 - bobina reativa com um circuito magnético altamente saturado com uma resistência indutiva X (a queda de tensão nas resistências R e X são aproximadamente as mesmas)
Determinação do escorregamento do motor usando uma bobina de indução. Este método se baseia no monitoramento da frequência de rotação dos fluxos de dispersão do rotor Fr (Fig. 5), que com frequência proporcional ao escorregamento atravessam as espiras da bobina de indução.
Arroz. 5. Esquema para medir o escorregamento do rotor de um motor elétrico assíncrono usando uma bobina de indução
Um milivoltímetro sensível (de preferência com zero no meio da escala) é conectado aos terminais da bobina; a bobina está localizada na extremidade do eixo do rotor. Girando a bobina em diferentes direções, eles encontram a posição onde são observadas as oscilações máximas da flecha do instrumento. A partir do número de oscilações completas k no tempo t, o valor do escorregamento é calculado

e em f = 50 Hz.

Para o cálculo, é conveniente contar 50 oscilações completas e anotar o tempo com um cronômetro. Então: .
Como bobina de indução, você pode usar uma bobina de relé ou um contator CC com 10 a 20 mil voltas (ou enrolar uma bobina com pelo menos 3.000 voltas). Para aumentar o fluxo magnético, um núcleo feito de várias tiras de aço transformador é inserido na bobina. O método da bobina de indução é muito simples e adequado para todos os tipos de máquinas.
Em motores assíncronos com rotor bobinado, além dos métodos descritos acima, o escorregamento pode ser determinado por meio de um amperímetro magnetoelétrico conectado a uma das fases do rotor e, na presença de resistência não comutável no circuito do rotor, por meio de um voltímetro conectado aos anéis do rotor. Recomenda-se a utilização de instrumentos com escala de dupla face. O escorregamento de um motor de indução é calculado a partir do número de oscilações completas da agulha do dispositivo, assim como quando se usa o método da bobina de indução.
