Circuitos de controle de acionamento elétrico
 Dependendo da velocidade dos elevadores de passageiros, são adotados os seguintes tipos de circuitos de controle de energia:
Dependendo da velocidade dos elevadores de passageiros, são adotados os seguintes tipos de circuitos de controle de energia:
-
elevadores de baixa velocidade têm motores de gaiola de esquilo ou rotor de fase e um controle de botão ou alavanca,
-
elevadores de alta velocidade - motores de duas ou uma velocidade controlados por estações magnéticas ou estações de controle de tiristores (TSU-R) com botões de controle,
-
elevadores de alta e alta velocidade - motores DC controlados pelo sistema "gerador - motor" com diferentes esquemas de excitação ou pelo sistema "conversor tiristor - motor" com botões,
-
cadeias de cascatas de válvulas assíncronas (AVK) também podem ser usadas, cujo uso permite aumentar a eficiência. instalação.
Os elevadores de passageiros, dependendo do fluxo de passageiros, da altura de elevação e do número de elevadores que atendem os passageiros, são divididos em controle individual e de grupo.
Solteiros incluem:
a) elevadores operando em ordens únicas e chamadas sem cruzamento paradas durante a descida e subida de passageiros,
b) elevadores com embarque de passageiros na descida, mas com proibição de chamadas na subida,
c) o mesmo, mas com registro de chamadas ao descer com sua posterior execução.
Os elevadores operados pelo grupo incluem:
a) elevadores com um botão para chamar os locais de desembarque, independentemente do número de elevadores instalados (o controle duplo é mais usado) e com embarque de passageiros ao descer,
b) o mesmo, mas com a arrecadação completa de passageiros nos andares intermediários para embarque e desembarque (geralmente instalados em prédios administrativos, educacionais e outros).
Além disso, é muito comum enviar elevadores para várias casas e bairros inteiros, quando o estado dos circuitos é monitorado a partir de um console de despacho e vários elevadores são controlados.
Independentemente da velocidade dos elevadores, controle individual ou em grupo deles, os elementos necessários da maioria de seus esquemas são os seguintes:
-
botões auto-ajustáveis, botões adesivos ou de fechamento para chamar táxis e dar um pedido do táxi,
-
vários sensores de seleção e dispositivos de correspondência de parada precisos para registrar a localização da cabine e o estado dos circuitos elétricos,
-
sensores e intertravamentos para o estado dos cabos de içamento, o estado das portas da mina e da cabine (abertas ou fechadas),
-
interruptores de limite para limitar a velocidade e o grau de carga da cabine,
-
indicadores de direção do movimento do carro e, em alguns elevadores, presença de carga no carro.
Desses itens, vamos nos deter mais detalhadamente nos dispositivos de correspondência de posição (PSCs), que determinam o local onde o carro da mina deve parar quando ocorre uma chamada ou ordem e seu movimento para cima ou para baixo.Os itens restantes são geralmente várias modificações de interruptores de limite conhecidos de outros cursos.
Estruturalmente, os dispositivos de correspondência de posição são implementados na forma de um conjunto de sensores eletromecânicos ou indutivos ou magnéticos (reed) de três posições localizados em minas, com saída de sinais para um relé ou seletor sem contato na sala de máquinas (os CCPs às vezes são implementados sob a forma de unidades de piso central localizadas na casa das máquinas) …
Os sensores localizados na mina interagem com os ramais montados na cabine (para eletromecânicos) ou shunts magnéticos (para indutivos ou reed switches) e enviam sinais para a unidade central de piso (copiadora de passos ou relé relé) instalada na praça de máquinas, e o o último transmite e um circuito de controle — um sinal para executar o comando recebido.
É mais conveniente colocar os sensores para sinais de movimento do carro para cima ou para baixo do carro (são necessários menos fios) e instalar shunts magnéticos nas minas nos pontos necessários. Neste caso, com controle digital, o número de colunas com shunts instalados ao longo do eixo é igual ao número de bits do número do andar transmitido em código binário ou outro.
Os interruptores eletromecânicos de três posições são movidos para uma das posições correspondentes ao movimento da cabine para cima ou para baixo, ou sua parada, por um arranjo de ondulação.Nesse caso, quando o carro está em movimento, os contatos dos interruptores nos andares passados são acionados para uma das posições finais, preparando a ação da cadeia de chamadas e ordens, e quando o carro para, o interruptor é movido para a posição intermediária, desligando o circuito de controle dos contatores direcionais e, assim, impede que a cabine saia do andar quando o botão de pedido ou chamada for pressionado por engano.
A fim de garantir uma frenagem relativamente precisa do carro do elevador, recentemente sensores indutivos sem contato ou controlados magneticamente (reed) selados por contato começaram a ser usados em seus circuitos de controle. Esses sensores são instalados tanto na mina quanto na cabine: na mina há sensores para seleção (desaceleração), e na cabine há um sensor para parada precisa. Para interagir com os sensores, um shunt seletivo magnético de lanterna é colocado no cockpit e shunts ferromagnéticos de parada de precisão são colocados no eixo (em cada andar).
Os sensores indutivos consistem em um circuito magnético aberto em forma de U com uma bobina fechada em um invólucro. O enrolamento do relé executivo é conectado em série com ele e uma tensão de corrente alternada (U) é aplicada a eles.
Com um circuito magnético aberto, o fluxo magnético que atravessa a bobina é pequeno. Daí a f.e.m. e a corrente de auto-indução nos fios da bobina, bem como a resistência indutiva (X) causada por ela, estão praticamente ausentes, portanto a resistência da bobina está ativa (R). A corrente nas bobinas conectadas em série é relativamente grande; imita o fechamento dos contatos no sistema de contato (o relé liga).
Quando o shunt fecha o circuito magnético em forma de U, o fluxo magnético que atravessa sua bobina aumenta e, portanto, a fem aumenta. auto-indutância, bem como a resistência indutiva da bobina devido a ela. Com isso, a corrente nas bobinas conectadas em série diminui, simulando a abertura do circuito no sistema de contatos (o relé executivo é desligado).
O reed switch é um corpo em forma de U no qual de um lado da ranhura são colocados dois frascos de vidro selados com vácuo no interior e contatos fixados em placas de mola que são conectadas aos respectivos circuitos de controle do elevador. Do outro lado do slot há um ímã permanente. O elemento de trabalho de tais sensores é um shunt ferromagnético que passa pelo corte em forma de U quando o carro do elevador se move.
O princípio de operação desses sensores é o seguinte: as forças de mola das placas de contato dos reed switches são direcionadas de forma que, se o campo de um ímã permanente não atuar sobre eles, os contatos normalmente abertos são abertos e os normalmente contatos fechados são fechados, ou seja, os circuitos aos quais esses contatos estão conectados serão abertos ou fechados.
Esta condição de interruptor reed será quando o shunt ferromagnético estiver na ranhura de um corpo em forma de U, porque as linhas do campo magnético do ímã permanente são fechadas através do shunt. Uma vez que o shunt sai do sulco, as linhas do campo magnético são fechadas através do shunt as placas, superando sua ação de mola, e os contatos do reed switch e, portanto, os circuitos aos quais estão conectados, passam para o estado oposto.

Como um exemplo que reflete as principais características dos esquemas de controle do elevador, considere o esquema de controle para um único elevador sem paradas associadas mostrado na Fig. 1. O elevador atende quatro andares; um motor assíncrono de duas velocidades M é usado como motor executivo.
A inclusão de rotações baixas (Ml) ou altas (B) do motor é realizada pelos contatores correspondentes Ml e B. O sentido de rotação do motor é determinado pelos contatores B e H, desaceleração - por um resistor adicional P, parada - por freio eletromagnético ET.
Usado como interruptores de chão sensores indutivos sem contato (DTS, DTOV e DTON) conectados em série com as bobinas do relé (RIS, RITOV, RITON). Os sensores TTP são usados para ligar o acionamento do elevador em alta velocidade e dar um impulso para desacelerar, enquanto os sensores DTOV e DTON são projetados para parar com precisão o elevador no nível do andar correspondente e são colocados no carro, shunts magnéticos para eles são instalados no eixo do eixo.
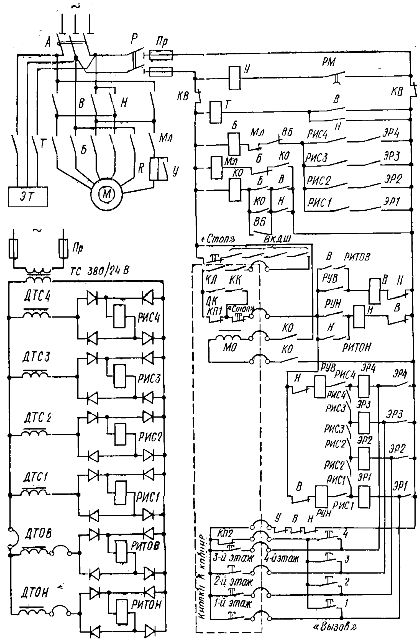
Arroz. 1. Diagrama esquemático de um único controle de elevador
Consideremos a finalidade dos restantes elementos do circuito e o seu funcionamento a partir do exemplo da deslocação de uma cabina com passageiro do 1º para o 3º andar, assumindo que a máquina automática A, o seccionador P e os fins de curso KB que limitam o movimento da cabine para cima e para baixo em modos de emergência, são fechados e a cabine fica no térreo. Nesse caso, as bobinas do relé RIS, além do relé do primeiro andar, fluem da corrente nominal.
Quando o botão «3º andar» é pressionado, o seguinte circuito elétrico é formado: fase da rede — pólo do seccionador P — fusível Pr — fim de curso KB — botão «Stop» — travamento das portas da mina D1 — D4 — contatos para tensionamento a corda KK — chave fim de curso de segurança KL — chaves de porta de cabine DK — contatos do botão «Stop» — bloco de abertura -contato Í — bobina do relé RUV — contatos de fechamento dos relés RIS4 e RISZ (as bobinas desses relés carregam corrente) — bobina do relé de andar ERZ — botão «3° andar» — blocos de abertura — contatos dos contatores U, B, N — fim de curso KB — fusível R — pólo seccionador P — fase da rede.
Após a atuação do relé RUV e ER3, o contator de avanço B, o contator de avanço rápido B (no circuito da bobina B — contato de bloco ML — chave de alta velocidade VB — contatos de relé RISZ e ER3) são ligados. Quando os contatos B e B estão fechados, o motor é conectado à rede, o contator T, a polia de liberação e o contator KO, que liga o solenóide MO e prepara o circuito da bobina do contator de baixa velocidade Ml, são ligado. O curso retrai, liberando a alavanca de travamento e a cabine começa a se mover.
Quando a cabine se aproxima do terceiro andar, o shunt ferromagnético fecha a bobina do sensor TTSZ, sua resistência aumenta e o relé RISZ desaparece, desligando os relés ER3 e RUV. Como resultado, o contator B desaparece, fechando seu contato, liga o contator de baixa velocidade Ml e o contator B permanece ligado, porque quando o carro está em movimento, o circuito magnético do sensor de freio preciso ainda não está fechado, portanto, o Contato RITOV ainda não aberto.O motor é parado em baixa rotação operando em modo gerador com um resistor R. introduzido em uma fase do estator.
Assim que o piso do carro estiver alinhado com o piso do piso, o shunt magnético fecha o circuito magnético da bobina do sensor de parada exata DTOV, o relé RITOV desaparece e os contatores B, depois KO e finalmente ML são acionados Como resultado, o eletroímã do motor e o freio são desconectados da rede elétrica, o freio mecânico é aplicado e a cabine é parada.
Aprender um esquema coletivo para controlar elevadores com paradas de passagem apenas ao abaixar o carro ou um esquema totalmente coletivo, ou seja, ao passar paradas enquanto o carro sobe e desce, é necessário em um esquema semelhante ao discutido na fig. 1, introduzir algumas adições. Por exemplo, em um circuito de motor de duas velocidades, os sensores indutivos ID, o relé RIS e os botões de chamada e ordem em cada andar estão incluídos, conforme mostrado na Fig. 2.
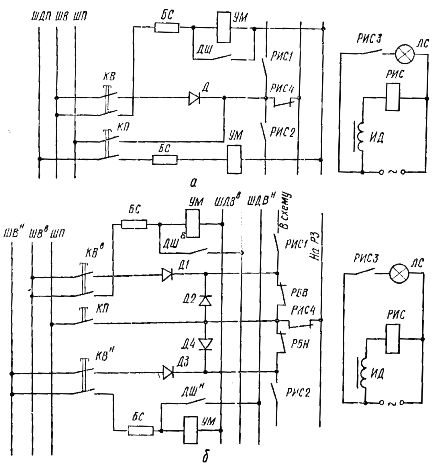
Arroz. 2. Fragmentos de adições aos esquemas coletivos de controle de elevadores (um andar)
Em um esquema com paradas de passagem ao abaixar a cabine (Fig. 2, a), as chamadas e ordens são dadas por botões adesivos separados e, portanto, podem ser registradas a qualquer momento e transmitidas ao esquema imediatamente, exceto pelo período de movimento do cabine com passageiros para cima quando o barramento de alimentação das chamadas dos contatos de transferência para o circuito executivo são desligados por contatos seletivos do barramento positivo.
No esquema de controle seletivo completo (Fig. 2, b) existem circuitos de toque adicionais para cabines de embarque (ШДВв) e descida (ШДВн), os contatos dos relés de bloqueio RBV e RBN são conectados aos contatos do circuito executivo do circuito seccional seletivo .
Nos diagramas mostrados nas Figs. 1 e 2, na ausência de cabine no piso, as bobinas do sensor indutivo ID e do relé RIS são energizadas. Portanto, quando você pressiona o botão de comando de comando ou chama KV (eles são mantidos no estado ligado pelos ímãs de retenção do UM até serem superados pelos contatos das portas da mina neste andar do DSh), um circuito é formado (não mostrado nas figuras) que inclui o relé de controle de subida RUV se o andar de destino for mais alto que o andar do estacionamento, ou o relé de controle de descida LVL se o andar de destino estiver abaixo do estacionamento.
Após a chegada da cabine ao andar de chamada, o ID do sensor indutivo é ventilado, o relé RIS é desligado, abrindo seus contatos, o que desliga o relé RUV ou RUN e a lâmpada LS (a cabine para), e fechando o contato RIS4, um circuito é preparado para a execução da ordem vinda do carro.
No circuito coletivo completo, o circuito dividido pelos contatos RIS1 e RIS2 no piso do estacionamento do carro é interrompido não apenas por esses contatos, mas também pelos contatos do relé de bloqueio RBV ascendente ou RBN descendente (suas bobinas não são mostrados no diagrama), e os circuitos de elevação, abaixamento e ordenação são separados uns dos outros pelos diodos de separação D1 - D4.
Antes de pressionar o botão de chamada ou ordem, se ainda não tiver selecionado o sentido de marcha do veículo, todos os contatos do circuito de seleção de direção são fechados, exceto os contatos RIS4 no andar de estacionamento.Portanto, quando um destes botões é pressionado, os sinais de chamada dos andares localizados acima do piso do estacionamento são conectados à bobina do relé RUN, e os sinais de chamada dos andares abaixo do estacionamento incluem o relé RUV. Após a seleção da direção, simultaneamente com o relé RUV ou LVL, um dos relés de bloqueio de direção oposta RBV ou RBN é acionado, o que interrompe a saída através do circuito seccional de sinais de chamada não transitória com seus contatos.
No esquema mostrado na fig. 2, a, para baixar os passageiros, a cabine vai sem parar até o andar mais alto da conversa e depois desce com paradas de passagem, e no diagrama mostrado na fig. 2, b, se for necessário pegar passageiros, a cabine vai para o andar mais baixo da chamada, depois sobe com paradas de passagem.
Nos esquemas considerados, os seletores são feitos em elementos de relé. Junto com isso, outros seletores são usados: came, fotoelétrico, rastreamento de pincel contínuo, passo a passo, em elementos estáticos, etc.
Com grandes fluxos de passageiros, vários elevadores são instalados em um corredor, que possuem controle combinado em pares ou grupos para aumentar o conforto e melhorar a potência. O número de elevadores conectados em grupos geralmente não excede quatro, mas mais frequentemente três, embora sejam conhecidos sistemas que contenham até oito elevadores em um grupo.
No controle de grupo, geralmente existem três modos principais de operação do elevador: pico de subida, pico de descida e movimento equilibrado em ambas as direções. A ativação dos elevadores para um ou outro modo é realizada pelo despachante ou automaticamente por meio do relógio de programação instalado para cada grupo de elevadores.
Em prédios altos, cada grupo de elevadores é fixo para atender uma determinada área de andares, outros andares não são servidos por ele. Se houver vários elevadores no grupo que atendem a uma área ou prédio baixo, para aumentar a velocidade média de deslocamento reduzindo o número de paradas, podem ser alocados elevadores separados para atender os andares pares e ímpares.
Para efetuar o controle duplo ou em grupo dos elevadores, seus circuitos de controle devem ser coletivos e as chamadas para cada andar em ambas as direções devem ser registradas separadamente em cada direção por dispositivos de armazenamento adequados contendo relés, transistores, etc.
Como exemplo, refletindo as especificidades da operação no controle emparelhado de elevadores com relés de estacionamento adicionais do primeiro elevador 1PC e do segundo elevador 2PC, considere um fragmento do diagrama esquemático mostrado na fig. 3.
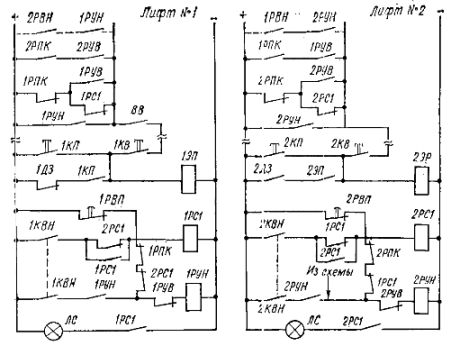
Arroz. 3. Fragmento de um diagrama esquemático de controle de elevador emparelhado: ER - relé de andar, RPK - relé de comutação de canal, relé de partida automática RVP
Nesse caso, o carro que desceu com passageiros no primeiro andar não atende chamadas de outros andares e espera pelos passageiros. Se não houver carro no primeiro andar, então o carro que subiu por ordem e é liberado é automaticamente enviado para o primeiro andar, e quando outro carro é baixado ou estacionado, o último permanece no andar no final do voo ou vai para o centro de carregamento e é usado para operação de chamada principalmente na direção de afundamento.
O relé de estacionamento da cabine do primeiro andar 1PC1 ou 2PC1 é ligado após a chegada da cabine do primeiro andar do interruptor de limite 1KVN ou 2KVN (instalado nas minas da copiadora). Esses relés estão bloqueados.Portanto, a inclusão de um deles indica que este carro chegou ao primeiro andar antes do outro. Neste caso, o relé 1PC1 ou 2PC1 com seu contato de fechamento aciona o sinalizador LS e com seu contato de abertura interrompe o circuito de toque de seu elevador, interrompendo a chamada enquanto o carro estiver estacionado no primeiro andar.
Quando a cabine sai do primeiro andar, sua lâmpada de sinalização LS apaga, a energia para os circuitos chamados deste elevador é restaurada imediatamente após a liberação da cabine e, após a chegada da cabine de outro elevador ao primeiro andar, seu relé de computador é ligadas. Esta cabine mantém-se no rés-do-chão e aguarda os passageiros (sinalizada pelo acendimento do avisador LS). Quando o carro que subiu à ordem é liberado e não há chamadas, um sinal é enviado ao circuito que liga as bobinas do relé 1RUN ou 2RUV 1RUN ou 2RUV através dos contatos de abertura do fim de curso 1KVN ou 2KVN, e o carro vai para o primeiro andar, e t .n.
O equipamento de controle do motor de elevadores de controle simples, duplos e de grupo típicos geralmente está localizado em painéis, estações ou unidades de controle típicas instaladas em salas de máquinas.