Sistemas de controle automático fechados
 Os sistemas de controle automático fechados (ACS) diferem dos circuitos abertos no equipamento usado e na abrangência da automação. Com o ACS aberto, a unidade principal (incluindo o equipamento de controle) não recebe informações sobre o modo de operação real da instalação elétrica (motor de acionamento, máquina de corrida).
Os sistemas de controle automático fechados (ACS) diferem dos circuitos abertos no equipamento usado e na abrangência da automação. Com o ACS aberto, a unidade principal (incluindo o equipamento de controle) não recebe informações sobre o modo de operação real da instalação elétrica (motor de acionamento, máquina de corrida).
Em um ASUB fechado, as informações são transmitidas aos elementos de controle, que são acompanhadas pelo envio dos sinais de comando apropriados. O circuito que transmite tais informações fecha a malha de controle, formando um ACS fechado ou ACS de realimentação.
A diferença entre ACS fechado e aberto pode ser explicada com o exemplo do controle de velocidade de um motor elétrico em um sistema gerador-motor (G-D). Com o ACS aberto (Fig. 1, a), a velocidade ajustada do motor elétrico é ajustada manualmente pelo potenciômetro P. O ajuste da velocidade é feito visualmente por um tacômetro, que é alimentado pelo tacogerador TG. Qualquer desvio de velocidade do ponto de ajuste é eliminado pelo operador atuando no controle deslizante do potenciômetro.
Em um ACS fechado (Fig.1, b) a armadura do tacogerador TG é incluída no circuito de excitação do gerador OVG, criando um sistema fechado ou realimentado (neste caso com realimentação de velocidade).
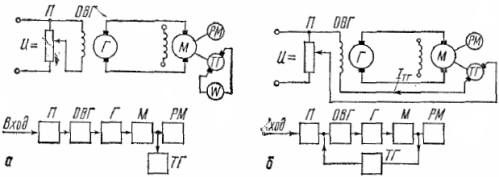
Arroz. 1. Circuito de controle do motor elétrico no sistema G -M: a — ACS aberto, b — ACS fechado
A corrente gerada pelo tacogerador (Aztg) em um circuito fechado direcionado para a corrente do potenciômetro (Azn) e a corrente resultante atua no circuito igual à diferença geométrica dessas correntes. Usando o controle deslizante do potenciômetro, o operador define o valor da corrente resultante na bobina de excitação do OVG, na qual a velocidade correspondente do motor elétrico é fornecida. É aqui que termina a função do operador. No futuro, o sistema mantém automaticamente o modo de operação definido do acionamento elétrico com certa precisão.
Suponha que, como resultado do pico de carga, a velocidade do motor elétrico tenha diminuído em relação à especificada. A redução na velocidade é acompanhada por uma redução correspondente na velocidade do tacogerador e na tensão em seus terminais. Isso, por sua vez, levará a uma diminuição na corrente Aztg no circuito de feedback e em uma determinada posição do controle deslizante do potenciômetro - um aumento na corrente resultante no enrolamento de excitação do gerador. A tensão do gerador e a velocidade do motor aumentarão de acordo.
O processo de aumentar a velocidade e a tensão continuará até que a corrente no loop de realimentação atinja o valor definido e a velocidade do motor atinja o valor definido.
Na análise de sistemas de controle automático, gráficos de função… Na fig.2 esquema funcional de transmissões do ACS, que inclui os seguintes elementos:
1 - dispositivo principal que define o modo de operação, dá um comando, inicia pulso ou sinal,
2 — elemento de comparação. Inclui o sinal X1 do mestre, o sinal X0, que determina a velocidade ou nível do valor controlado. Levando em consideração o sinal do nono elemento de feedback principal, o elemento 2 compara os sinais recebidos e envia o sinal corrigido adicionalmente X2,
3 — o elemento transformador, o sinal op o transforma em outra forma, mais conveniente para posterior transmissão. Por exemplo, o sinal X2 é fornecido na forma de pressão hidráulica (pneumática, mecânica) O elemento 3 o converte em corrente elétrica. Como esse tipo de transformação pode exigir energia adicional, o elemento 3 é conectado a uma fonte de energia PE,
4 — adicionando elemento, recebe dois sinais: X3 e X8 do elemento de correção (elemento de memória) 8. Esses sinais são somados pelo elemento 4 e enviados para o próximo elemento,
5 — elemento amplificador, o sinal de entrada X1 pode ser fraco e deve ser amplificado para transmissão subsequente. Isso é feito através do elemento 5 que está conectado à fonte de energia PE,
6 — elemento executivo, executa o sinal recebido (motor elétrico, relé eletromagnético, servo motor),
7 — objeto ajustável ou máquina de trabalho.
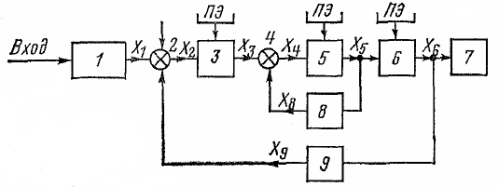
Arroz. 2. Diagrama funcional do ACS
Cada elemento de automação é um conversor de energia, em cuja entrada é aplicado o valor X' e retirado o valor X na saída. «Para cada elemento em estado estacionário existe uma certa dependência X» (X'), denominada característica estática.
Um sistema de controle automático fechado é caracterizado pela presença de feedback; ele tem pelo menos um loop de realimentação conectando a saída do sistema à sua entrada. Além disso, pode haver o chamado feedback interno, conectando a saída e a entrada de elementos ACS individuais.
O feedback é dividido em rígido e flexível. Restrições duras operam tanto em modos transitórios quanto estacionários de operação do sistema, flexíveis — apenas em transitórios. Diferencie feedback positivo e negativo. À medida que o valor regulado aumenta, a conexão positiva aumenta ainda mais e a negativa, ao contrário, diminui. Os feedbacks podem transmitir sinais proporcionais ao ângulo de rotação, velocidade, tensão, corrente, etc. e são chamados de ângulo, velocidade, tensão, feedbacks de corrente de acordo. Para mais detalhes veja aqui: Elementos de sistemas de automação
De acordo com o princípio de operação, o ACS pode ser dividido em três grupos:
-
operação contínua em que a relação entre os valores controlados e definidos não é quebrada,
-
ação de impulso, na qual a conexão entre os valores controlados e definidos ocorre em intervalos regulares,
-
ação do relé onde a comunicação ocorre apenas quando um valor atinge um determinado valor.
Dependendo da lei segundo a qual um determinado valor muda ao longo do tempo, o ACS também pode ser dividido em três grupos:
-
sistemas de ponto de ajuste constante ou baixo nos quais o valor controlado automaticamente é mantido constante. Estes são sistemas de estabilização, que são essencialmente sistemas de controle automático (ACS),
-
sistemas nos quais o valor alvo é alterado de acordo com um programa específico e predeterminado. É um sistema de gerenciamento de software,
-
sistemas em que um determinado valor pode variar amplamente e de acordo com uma lei arbitrária, ou seja, sistemas de rastreamento.