O princípio de operação do conversor de frequência e os critérios para sua seleção para o usuário
 Uma breve descrição da finalidade, princípio de operação e critérios para selecionar um conversor de frequência como dispositivo de controle para um motor elétrico assíncrono.
Uma breve descrição da finalidade, princípio de operação e critérios para selecionar um conversor de frequência como dispositivo de controle para um motor elétrico assíncrono.
Motor de indução gaiola de esquilo hoje é o dispositivo mais massivo e confiável para controlar várias máquinas e mecanismos. Mas toda medalha tem um outro lado.
As duas principais desvantagens do motor de indução são a impossibilidade de controle de velocidade do rotor, corrente inicial muito grande — cinco, sete vezes a nominal. Se forem usados apenas dispositivos de controle mecânico, essas desvantagens levam a grandes perdas de energia e cargas mecânicas de choque. Isso tem um efeito extremamente negativo na vida útil do equipamento.
Conversor de frequência

Conversor de frequência com controle de largura de pulso (PE com PWM) reduz as correntes de irrupção em 4-5 vezes. Ele fornece uma partida suave do motor de indução e controla o inversor de acordo com uma determinada relação tensão/frequência.
O conversor de frequência proporciona economia de energia de até 50%. Torna-se possível permitir feedback entre dispositivos vizinhos, ou seja, equipamento auto-ajustável para a tarefa e alterando as condições de operação de todo o sistema.
O princípio de operação do conversor de frequência
O conversor de frequência PWM é inversor de dupla conversão… Primeiro, a tensão de rede 220 ou 380 V é retificada pela ponte de diodos de entrada, depois é suavizada e filtrada usando capacitores.
Este é o primeiro estágio da transformação. No segundo estágio, de tensão constante, usando microcircuitos de controle e uma ponte de saída Interruptores IGBT, uma sequência PWM com uma certa frequência e ciclo de trabalho é formada. Na saída do conversor de frequência, são emitidos pacotes de pulsos retangulares, mas devido à indutância dos enrolamentos do estator do motor de indução, eles são integrados e finalmente se transformam em uma tensão próxima a uma senóide.
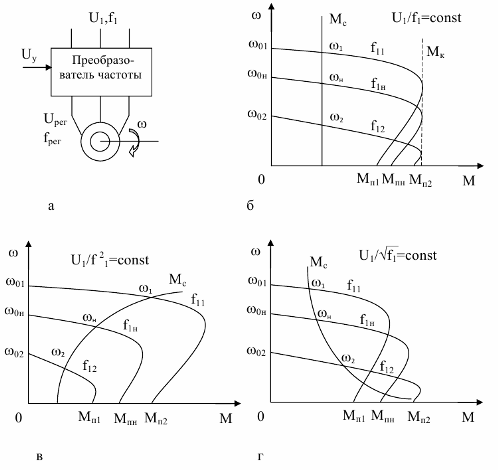 Características mecânicas de um motor elétrico assíncrono com regulação de frequência de velocidade: a — diagrama de ligação; b — características para uma carga com momento de resistência estático constante; c — características de carga do ventilador; d — características de torque de carga estática, inversamente proporcional à velocidade angular de rotação.
Características mecânicas de um motor elétrico assíncrono com regulação de frequência de velocidade: a — diagrama de ligação; b — características para uma carga com momento de resistência estático constante; c — características de carga do ventilador; d — características de torque de carga estática, inversamente proporcional à velocidade angular de rotação.
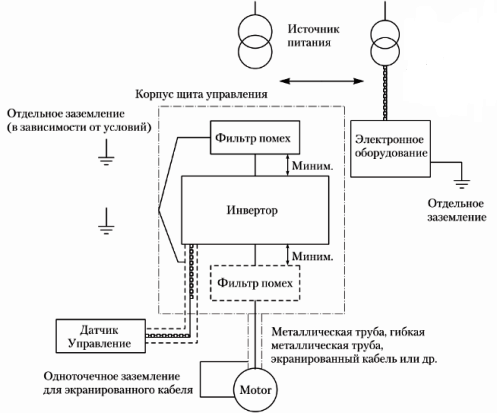 Um circuito típico para ligar um conversor de frequência
Um circuito típico para ligar um conversor de frequência 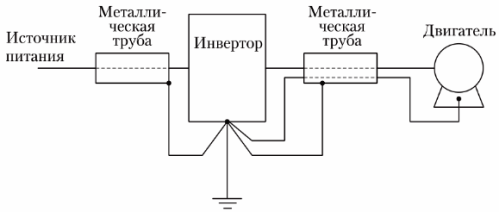 Um exemplo de conexão de linhas de energia (cabos) em um circuito conversor de frequência
Um exemplo de conexão de linhas de energia (cabos) em um circuito conversor de frequência
Critérios para selecionar conversores de frequência

Pelo método de controle
Descarte imediatamente os conversores que não são adequados em termos de potência, tipo de desempenho, capacidade de sobrecarga, etc. De acordo com o tipo de gestão que você tem que decidir o que escolher, controle escalar ou vetorial.
A maioria dos conversores de frequência modernos implementa controle vetorial, mas esses conversores de frequência são mais caros do que os conversores de frequência escalares.
O controle vetorial permite um controle mais preciso, reduzindo o erro estático. O modo escalar suporta apenas uma relação constante entre a tensão de saída e a frequência de saída, mas para ventiladores, por exemplo, isso é suficiente.
Desde a sua criação, o controle vetorial tornou-se uma estratégia de controle extremamente popular para motores de indução. Atualmente, a maioria dos conversores de frequência implementa controle vetorial ou mesmo controle vetorial sensorless (essa tendência é encontrada em conversores de frequência que originalmente implementam controle escalar e não possuem terminais para conectar um sensor de velocidade).
O princípio básico do controle vetorial consiste na regulação independente e separada da corrente de magnetização do motor e da corrente de quadratura, à qual o torque mecânico do eixo é proporcional. A corrente de magnetização determina o valor da ligação de fluxo zero do rotor e é mantida constante.
Quando a velocidade se estabiliza, o ponto de ajuste da corrente de quadratura é gerado usando um controlador PI separado cuja entrada é a discrepância entre a velocidade do motor desejada e a medida. Assim, a corrente de quadratura é sempre ajustada no nível mínimo para fornecer torque mecânico suficiente para manter a velocidade ajustada. Portanto, o controle vetorial tem alta eficiência energética.
Através do poder
Se a potência do equipamento for aproximadamente a mesma, escolha conversores da mesma empresa com capacidade de acordo com a potência da carga máxima. Isso garantirá a intercambialidade e simplificará a manutenção do equipamento. Recomenda-se que o centro de serviço do conversor de frequência selecionado esteja em sua cidade.
Através da tensão de rede
Sempre escolha um conversor com a maior faixa de tensão possível, tanto para baixo quanto para cima. O fato é que, para as redes locais, a própria palavra padrão só pode trazer risos em meio às lágrimas. Se a baixa tensão provavelmente fizer com que o conversor de frequência pare, então o aumento da tensão pode fazer com que os capacitores eletrolíticos principais explodam e a entrada do dispositivo falhe.
Por faixa de ajuste de frequência

Pelo número de entradas de controle
Entradas discretas são necessárias para inserir comandos de controle (iniciar, parar, inverter, parar, etc.). As entradas analógicas são necessárias para sinais de feedback (configuração e configuração do drive durante a operação). As entradas digitais são necessárias para receber sinais de alta frequência de sensores digitais de velocidade e posição (codificadores). O número de entradas nunca pode ser muito grande, mas quanto mais entradas, mais complexo o sistema pode ser construído e mais caro ele é.
Pelo número de sinais de saída
As saídas discretas são usadas para emitir sinais para vários eventos (alarme, superaquecimento, tensão de entrada acima ou abaixo do nível, sinal de erro, etc.). As saídas analógicas são usadas para construir sistemas de feedback complexos. As recomendações de seleção são semelhantes ao parágrafo anterior.
barramento de controle
O equipamento com o qual você controlará o conversor de frequência deve ter o mesmo barramento e número de entradas/saídas do conversor de frequência selecionado. Deixe algum espaço para entradas e saídas para atualizações futuras.
Sob garantia
O período de garantia indiretamente permite avaliar a confiabilidade do conversor de frequência. Naturalmente, você deve escolher um conversor de frequência com um plano de longo prazo.Alguns fabricantes prevêem especificamente casos de danos que não são cobertos pela garantia. Sempre leia a documentação com atenção e pesquise na internet avaliações de modelos e fabricantes de equipamentos. Isso ajudará você a fazer a escolha certa. Não economize dinheiro para um serviço de qualidade e treinamento de pessoal.
 Conversor de frequência no suporte
Conversor de frequência no suporte
capacidade de sobrecarga
Como primeira aproximação, a potência do conversor de frequência deve ser selecionada 10-15% mais do que a potência do motor. A corrente do conversor deve ser maior que a corrente nominal do motor e um pouco maior que a corrente de possíveis sobrecargas.
Na descrição de um determinado mecanismo, geralmente são indicadas as correntes de sobrecarga e a duração de seu fluxo. Leia a documentação! Isso o manterá entretido e possivelmente evitará danos ao equipamento no futuro. Se o inversor também for caracterizado por cargas de choque (pico) (cargas por 2-3 segundos), é necessário escolher um conversor para a corrente de pico. Pegue a margem de 10% novamente.
Veja também neste tópico: Conversores de frequência VLT AQUA Drive para unidades de bombeamento