Colocação de dispositivos compensatórios em redes de distribuição de empresas
 Ao escolher e colocar meios de compensação de potência reativa nos sistemas de fornecimento de energia de empresas industriais, dois grupos de redes industriais são distinguidos, dependendo da composição de suas cargas:
Ao escolher e colocar meios de compensação de potência reativa nos sistemas de fornecimento de energia de empresas industriais, dois grupos de redes industriais são distinguidos, dependendo da composição de suas cargas:
-
o primeiro grupo — redes de uso geral, redes com modo de sequência direta da frequência principal 50 Hz,
-
o segundo grupo — redes com cargas específicas não lineares, assimétricas e nitidamente variáveis.
Solução do problema compensação de potência reativa para o segundo grupo há uma série de características, incluindo a necessidade de fornecer indicadores de qualidade de energia para receptores elétricos com a velocidade necessária.
No projeto, o maior total calculado de potência ativa e reativa das empresas Rcalc e Qcalc, que é fator de estado da potência natural.
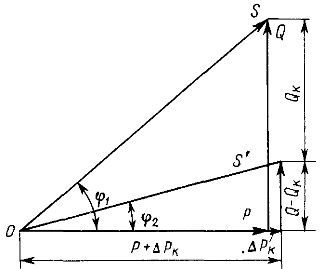
Diagrama de trabalho do dispositivo de compensação
Para determinar a potência dos dispositivos de compensação, a potência calculada Qcalculada não é usada., e o menor valor Qswing levando em consideração a discrepância no tempo entre a maior carga ativa do sistema de energia e a maior potência reativa da empresa industrial. Essa discrepância é levada em consideração pelo coeficiente de oscilação, cujos valores, dependendo do setor ao qual o empreendimento pertence, variam de 0,75 a 0,95. Então Qswing = swing Qcalc
Os valores da maior carga ativa Pcalc e o reativo total Qmax são levados em consideração no sistema de potência para determinar o valor da potência reativa econômica ótima que o sistema de potência pode transferir para a concessionária nos modos de maior e menor carga ativa do sistema de potência, respectivamente Qe1 e Qe2.
Pela potência QNSl é determinada a potência total dos dispositivos de compensação QNS = QmaNS -Qe1, e pela potência QNS2 — parte ajustável dos dispositivos de compensação QNSreg=Qe1 — Qe2
Os dispositivos de compensação instalados nos barramentos de baixa tensão das principais subestações abaixadoras (GSP) do empreendimento não só garantem a manutenção do fator de potência do sistema cosφsyst, como também reduzem a potência dos transformadores de potência GPP Str:

Tais dispositivos de compensação podem ser compensadores síncronos, bancos de capacitores e motores síncronos.
Os compensadores síncronos são instalados apenas em plantas de transporte de gás de grandes empreendimentos industriais de acordo com o sistema de fornecimento de energia, enquanto os compensadores síncronos estão no equilíbrio do sistema de energia e são usados quando necessário (por exemplo, em caso de falhas do sistema) como um backup fonte de energia reativa. Portanto, sua instalação em redes do primeiro grupo é limitada.
Os motores síncronos de alta tensão (motores compressores, estações de bombeamento etc.) bancos de capacitores.

O balanço de potência reativa em um nó de 6 — 10 kV de uma planta industrial pode ser escrito como a seguinte relação:
Qvn + Qtp + ΔQ — Qsd — Qkb — Qe1 = 0,
onde Qvn é a carga reativa calculada dos receptores de alta tensão (HV) 6 — 10 kV, Qtp é a potência de carga não compensada Qn redes até 1 kV alimentadas por transformadores de subestações transformadoras de oficina (TS), ΔQ — perdas de potência reativa no rede 6 — 10 kV, especialmente em transformadores GPP.
O uso de capacitores para tensões de 6 a 10 kV reduz o custo da compensação de potência reativa, pois os capacitores de baixa tensão costumam ser mais caros (por kvar de potência).
Nas redes de baixa tensão (até 1 kV) de empreendimentos industriais, aos quais estão conectados a maioria dos receptores de eletricidade que consomem energia reativa, o fator de potência da carga está na faixa de 0,7 a 0,8. Essas redes estão eletricamente mais distantes das alimentações do sistema de energia ou do CHP local (CHP).Portanto, para reduzir os custos de transmissão de potência reativa, os dispositivos de compensação estão localizados diretamente na rede até 1 kV.

Em empresas com cargas específicas (choque, fortemente variável), além dos dispositivos de compensação mencionados acima, os dispositivos de compensação de filtro, balanceamento e balanceamento de filtro são usados nas redes do segundo grupo. Recentemente, em vez de compensadores rotativos, são cada vez mais utilizados compensadores de potência reativa estática (STK), que, além de melhorar o fator de potência, permitem estabilizar a tensão de alimentação.
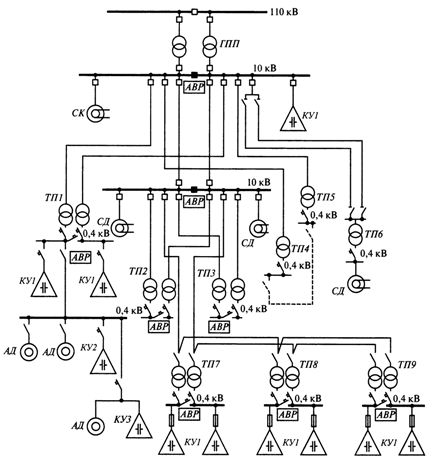
Arroz. 1. Colocação de dispositivos de compensação nas redes de fornecimento de energia de uma empresa industrial: GPP — a principal subestação redutora da empresa, SK — compensador síncrono, ATS — comutador de transferência automática, KU1 — KB para compensação de potência reativa centralizada, KU2 — KB para compensação de grupo de potência reativa, KU3 — KB para compensação de potência reativa individual, TP1 -TP9 — subestações transformadoras de oficina, SD — motores síncronos, AD — motores assíncronos
Nas redes de serviço da maioria das empresas, os bancos de capacitores estáticos são usados para regulação de potência reativa. Neste caso, é realizada a compensação de potência reativa centralizada (KU1), em grupo (KU2) ou individual (KU3).
Assim, as fontes de potência reativa no sistema de alimentação de uma planta industrial utilizadas para compensar a potência reativa podem ser localizadas conforme mostrado na Fig. 1.