Reverter e parar o motor de indução tipo gaiola de esquilo
Um motor de indução é uma máquina reversível. Para alterar o sentido de rotação do rotor, é necessário alterar o sentido de rotação do campo magnético (trocando os fios de alimentação aos terminais das duas fases do motor) — Circuitos de partida e freio do motor
As características mecânicas para dois sentidos de rotação são mostradas na Fig. 1.
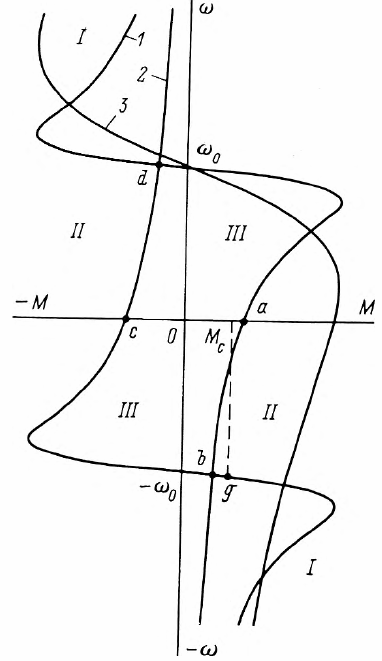
Arroz. 1. Família de características mecânicas de um motor de indução para funcionamento reversível em modo parado com fornecimento de energia à rede (I), modo de oposição (II) e motor (III) 1, 2 — natural; 3 — artificiais.
Um motor de indução tipo gaiola de esquilo pode ser usado não apenas como motor, mas também como freio. No modo de parada, cada motor elétrico sempre funciona como um gerador. Nesse caso, um motor elétrico de indução com rotor em gaiola de esquilo pode ter três modos de frenagem.
No modo de frenagem regenerativa, a máquina opera com escorregamento negativo. Neste caso, a velocidade do rotor excede a velocidade de rotação do campo magnético.Claro, para mudar para este modo, um momento ativo externo deve ser aplicado ao lado do eixo.
O modo de feedback é amplamente utilizado em instalações de elevação. Durante a descida, o sistema de propulsão, devido à energia potencial da carga, pode adquirir uma velocidade superior à velocidade de rotação do campo magnético, e a descida ocorrerá em estado de equilíbrio correspondente a um determinado ponto g na característica mecânica , quando o momento estático criado pela carga descendente é compensado pelo torque de frenagem do motor.
Em acionamentos convencionais com torque estático reativo, o modo em questão é implementado apenas por meio de circuitos de controle especiais, que permitem reduzir a velocidade de rotação do campo magnético. As características mecânicas de uma máquina de indução para o modo de realimentação são mostradas na mesma figura. 1.
Como mostrado, o torque máximo no modo gerador é ligeiramente maior do que no modo motor, e o escorregamento crítico em valor absoluto é o mesmo.
Geradores assíncronos como tal têm um alcance muito estreito, ou seja, usinas de energia eólica... Como a força do vento não é constante e, portanto, a velocidade de rotação do dispositivo muda significativamente, um gerador assíncrono é preferível nessas condições.
O mais amplamente utilizado é o modo de frenagem — oposição. A transição para este modo de motores assíncronos, bem como de motores CC, é possível em dois casos (Fig. 1): com um aumento significativo do torque estático (seção ab) ou ao alternar o enrolamento do estator para um sentido de rotação diferente ( seção CD).
Em ambos os casos, o motor opera com escorregamento maior que 1 até que as correntes ultrapassem as correntes de partida. Portanto, para um motor de gaiola de esquilo, este modo só pode ser usado para parar rapidamente o inversor.
Ao atingir a velocidade zero, o motor deve ser desconectado da rede elétrica, caso contrário ele tenderá a acelerar no sentido contrário.
Ao frear por motores de rotores opostos, uma resistência do reostato deve ser introduzida no circuito do rotor para limitar a corrente e aumentar o torque de frenagem.
Também é possível modo de frenagem dinâmica… No entanto, isso levanta algumas dificuldades. Quando o motor é desligado da rede elétrica, o campo magnético da máquina também desaparece. É possível excitar uma máquina de indução a partir de uma fonte de corrente contínua conectada a um estator desconectado da rede de corrente alternada. A fonte deve fornecer uma corrente no enrolamento do estator próxima da nominal. Como essa corrente é limitada apenas pela resistência elétrica da bobina, a tensão da fonte CC deve ser baixa (normalmente 10 a 12 V).
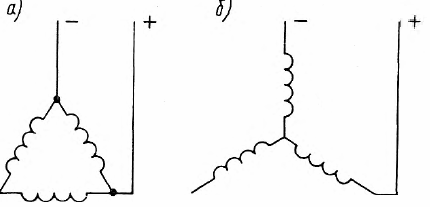
Arroz. 2. Conectando o estator de um motor de indução a uma fonte CC no modo de frenagem dinâmica quando conectado em delta (a) e estrela (b)
A auto-excitação também é usada para frenagem dinâmica. Os capacitores são conectados ao estator desconectados da rede elétrica.
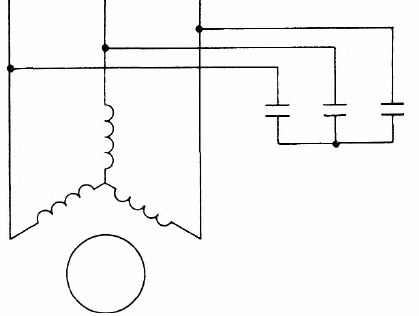
Arroz. 3. Esquema de frenagem dinâmica de um motor de indução autoexcitado
À medida que o rotor gira, um EMF é criado no circuito do estator devido à magnetização residual e ao fluxo de corrente através dos enrolamentos do estator, bem como através dos capacitores.Quando uma certa velocidade é atingida no circuito do estator, ocorrem condições ressonantes: a soma das resistências indutivas será igual à resistência capacitiva. Será iniciado um processo intensivo de autoexcitação da máquina, o que levará a um aumento do EMF. O modo de auto-excitação terminará quando o EMF da máquina E e a queda de tensão nos capacitores forem iguais.
O torque de frenagem máximo com o aumento da capacidade muda para velocidades mais baixas. As desvantagens do modo de frenagem considerado são a aparência da ação de frenagem apenas dentro de uma determinada zona de velocidade e a necessidade de usar grandes capacitores para frenagem em baixas velocidades.
No lado positivo, nenhuma fonte adicional de energia elétrica é necessária. Este modo é sempre implementado em instalações onde um banco de capacitores é conectado ao motor para melhorar o fator de potência da rede de alimentação.
Veja também neste tópico: Circuitos de freio para motores assíncronos