Regulação de frequência de um motor assíncrono
Atualmente, o controle de frequência da velocidade angular de rotação de um acionamento elétrico com motor assíncrono é amplamente utilizado, pois permite em uma ampla faixa alterar suavemente a velocidade de rotação do rotor tanto acima quanto abaixo do valor nominal.
Os conversores de frequência são equipamentos modernos e de alta tecnologia com uma ampla faixa de ajuste que possuem um amplo conjunto de funções para controle de motores assíncronos. A mais alta qualidade e confiabilidade permitem utilizá-los em diversas indústrias para controlar acionamentos de bombas, ventiladores, transportadores, etc.

Os conversores de frequência para tensão de alimentação são divididos em monofásicos e trifásicos, mas por design, em máquinas elétricas rotativas e estáticas. Nos conversores de máquinas elétricas, a frequência variável é obtida por meio de máquinas elétricas convencionais ou especiais. V conversores de frequência estáticos a mudança na frequência da corrente de alimentação é conseguida pelo uso de elementos elétricos que não têm movimento.
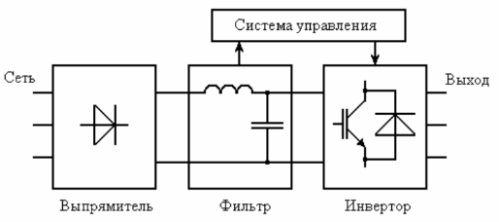
Circuito conversor de frequência de um motor de indução
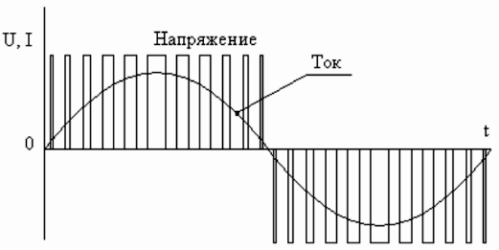
Sinal de saída do conversor de frequência
Os conversores de frequência para redes monofásicas podem fornecer acionamento elétrico para equipamentos de produção com potência de até 7,5 kW. Uma característica do projeto dos conversores monofásicos modernos é que na entrada há uma fase com tensão de 220V e na saída três fases com o mesmo valor de tensão, o que permite conectar motores elétricos trifásicos a um dispositivo sem o uso de capacitores.
Os conversores de frequência alimentados por rede trifásica de 380 V estão disponíveis na faixa de potência de 0,75 a 630 kW. Dependendo do valor da potência, os dispositivos são produzidos em combinações de polímeros e caixas de metal.
A estratégia de controle mais popular para motores de indução é o controle vetorial. Atualmente, a maioria dos conversores de frequência implementa controle vetorial ou mesmo controle vetorial sensorless (essa tendência é encontrada em conversores de frequência que originalmente implementam controle escalar e não possuem terminais para conectar um sensor de velocidade).
Dependendo do tipo de carga de saída, os conversores de frequência são subdivididos de acordo com o tipo de implementação:
-
para acionamentos de bombas e ventiladores;
-
para propulsão elétrica industrial geral;
-
funciona como parte de motores elétricos operando com sobrecarga.

Características mecânicas de cargas típicas
Os conversores de frequência modernos possuem um conjunto diversificado de características funcionais, por exemplo, possuem controle manual e automático da velocidade e sentido de rotação do motor, bem como potenciômetro embutido no painel de controle.Dotado da capacidade de ajustar a faixa de frequência de saída de 0 a 800 Hz.
Os conversores são capazes de controlar automaticamente um motor assíncrono de acordo com sinais de sensores periféricos e acionar um acionamento elétrico de acordo com um determinado algoritmo de temporização. Suporta funções de recuperação automática em caso de falha de energia de curto prazo. Realize o controle de transientes a partir de um console remoto e proteja os motores elétricos contra sobrecarga.

A relação entre a velocidade angular de rotação e a frequência da corrente de alimentação segue da Eq.
ωo = 2πe1/ p
Com uma tensão de alimentação constante U1 e uma mudança na frequência, o fluxo magnético do motor de indução muda. Ao mesmo tempo, para melhor aproveitamento do sistema magnético, com diminuição da frequência de alimentação, é necessário reduzir proporcionalmente a tensão, caso contrário a corrente de magnetização e as perdas no aço aumentarão significativamente.
Da mesma forma, conforme a frequência de alimentação aumenta, a tensão deve aumentar proporcionalmente para manter o fluxo magnético constante, pois caso contrário (com um torque de eixo constante) isso fará com que a corrente do rotor aumente, sobrecarregando seus enrolamentos de corrente e reduzindo o torque máximo.
A lei racional de regulação de tensão depende da natureza do momento de resistência.
Em um momento constante de carga estática (Ms = const), a tensão deve ser regulada proporcionalmente à sua frequência U1 / f1 = const. Pela natureza da carga do ventilador, a relação assume a forma U1 / f21 = const.
Com torque de carga inversamente proporcional à velocidade U1 /√f1 = const.
As figuras abaixo mostram um diagrama de ligação simplificado e características mecânicas de um motor de indução com controle de frequência de velocidade angular.
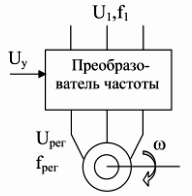
Diagrama de conexão de um conversor de frequência a um motor assíncrono
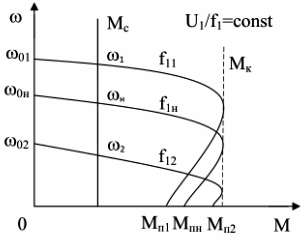
Características de uma carga com momento de resistência estático constante
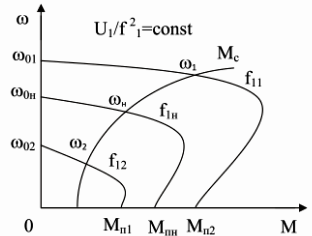
NSRecursos para carregar o ventilador
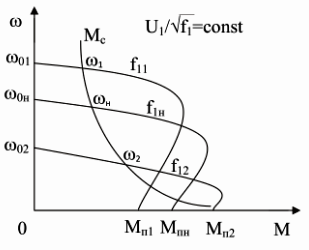
Características sob torque de carga estática inversamente proporcional à velocidade angular de rotação
A regulação de frequência da velocidade de um motor assíncrono permite alterar a velocidade angular de rotação na faixa - 20 … 30 a 1. A regulação da velocidade de um motor assíncrono abaixo do motor principal é realizada praticamente a zero.
Quando a frequência da rede de alimentação muda, o limite superior da velocidade de rotação de um motor assíncrono depende de suas propriedades mecânicas, especialmente porque em frequências acima do nominal o motor assíncrono opera com melhores características energéticas do que em frequências mais baixas. Portanto, se uma caixa de engrenagens for usada no sistema de acionamento, esse controle de frequência do motor deve ser realizado não apenas para baixo, mas também para cima do ponto nominal, até a velocidade de rotação máxima permitida nas condições de resistência mecânica de o rotor.
Quando a velocidade do motor aumenta acima do valor indicado em seu passaporte, a frequência da fonte de alimentação não deve exceder a nominal em não mais que 1,5 - 2 vezes.
O método da frequência é o mais promissor para a regulação de um motor de indução com rotor em gaiola de esquilo. As perdas de potência com tal regulação são pequenas, pois não são acompanhadas de aumento de Deslizamento… As características mecânicas resultantes são altamente rígidas.