Formas estruturais de motores assíncronos
 Formas estruturais externas motores assíncronos são determinados pela forma como o motor é montado e a forma de sua proteção contra a influência do meio ambiente. O desempenho motor normal da perna é generalizado (Fig. 1, a). Neste caso, o eixo do motor deve estar na horizontal. Os motores com flanges (Fig. 1, b) são amplamente utilizados para instalações horizontais e verticais.
Formas estruturais externas motores assíncronos são determinados pela forma como o motor é montado e a forma de sua proteção contra a influência do meio ambiente. O desempenho motor normal da perna é generalizado (Fig. 1, a). Neste caso, o eixo do motor deve estar na horizontal. Os motores com flanges (Fig. 1, b) são amplamente utilizados para instalações horizontais e verticais.
Eles também produzem motores de indução em linha que não possuem estrutura, protetores de extremidade, eixo. Os elementos de tal motor estão embutidos nas partes do corpo da máquina, e o eixo do motor é um dos eixos da máquina (geralmente o fuso), e a cama é o corpo do conjunto da máquina, por exemplo, uma cabeça de moagem (Fig. . 2).
Motores de projeto especial são amplamente distribuídos no exterior, incluindo motores com pequenas dimensões radiais e comprimento considerável, e motores de disco, particularmente com um estator em forma de cilindro e um rotor externo em forma de anel. Também são utilizados motores, quando acionados, o rotor, que tem formato de cone, move-se no sentido axial, desenvolvendo uma força de empuxo significativa.
Esta força é utilizada para liberar o freio mecânico atuante no eixo do motor após o motor ser desconectado da rede elétrica. Além disso, vários designs de motores são usados com caixas de engrenagens anexadas, caixas de engrenagens e variadores mecânicos que fornecem regulagem suave.
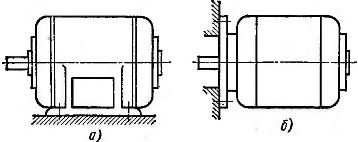
Arroz. 1. Projeto de motores assíncronos
A desvantagem de usar motores com formas de projeto especiais é a dificuldade de substituí-los em caso de acidente. Um motor elétrico defeituoso não deve ser substituído, mas consertado, e a máquina deve ficar ociosa durante o reparo.
Motores com várias formas de proteção ambiental são usados para acionar as máquinas.
Os motores blindados possuem grades que cobrem as aberturas nas tampas das extremidades. Isso evita que objetos estranhos entrem no motor e também evita que o trabalhador toque em peças rotativas e energizadas. Para evitar que gotas de líquido caiam de cima, os motores são equipados com respiradouros verticais ou descendentes.
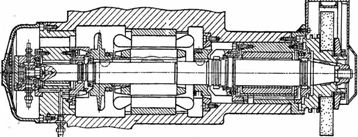
Arroz. 2. Motor de moagem embutido
No entanto, quando esse motor elétrico funciona em uma oficina, seu ventilador, juntamente com o ar, suga poeira, borrifa refrigerante ou óleo, bem como pequenas partículas de aço ou ferro fundido que, aderindo ao isolamento do enrolamento e vibrando sob a influência de um campo magnético alternado, desgasta rapidamente o isolamento.
Motores fechados, cujas telas finais não possuem orifícios de ventilação, possuem proteção mais confiável contra influências ambientais. Esses motores, com as mesmas dimensões dos protegidos, devido ao resfriamento mais pobre, têm menos potência.Com as mesmas potências e velocidades, o motor elétrico fechado é 1,5 a 2 vezes mais pesado que o protegido e, portanto, seu preço é mais alto.
O desejo de reduzir o tamanho e o custo dos motores fechados levou à criação de motores elétricos soprados fechados. Esse motor elétrico tem um ventilador externo montado na extremidade do eixo do motor oposta à extremidade do acionamento e coberto com uma tampa. Este ventilador sopra em torno da carcaça do motor.
Os motores dos ventiladores são significativamente mais leves e baratos do que os fechados. Motores soprados são usados com mais frequência para acionar máquinas de corte de metal. Motores com outras formas de proteção ambiental são relativamente raramente usados para acionar máquinas de corte de metal. Em particular, motores elétricos fechados às vezes são usados para acionar retificadoras.
Os motores elétricos são projetados para tensões padrão de 127, 220 e 380 V. O mesmo motor pode ser conectado a redes com tensões diferentes, por exemplo, a redes com tensões de 127 e 220 V, 220 e 380 V. com duas tensões, o o enrolamento do estator do motor elétrico é conectado em um triângulo, para um maior - em uma estrela. A corrente nos enrolamentos do motor elétrico e a tensão neles serão as mesmas em ambos os casos com esta inclusão. Além disso, eles produzem motores elétricos de 500 V, seus estatores estão permanentemente conectados em estrela.
Os motores assíncronos de gaiola de esquilo usados em muitas indústrias são produzidos com uma potência nominal de 0,6-100 kW por velocidades síncronas 600, 750, 1000, 1500 e 3000 rpm.
A seção transversal dos fios do enrolamento do motor elétrico depende da magnitude da corrente que flui através dele. Com uma corrente maior, o enrolamento do motor terá um volume maior.A seção transversal do circuito magnético é proporcional à magnitude do fluxo magnético. Desta forma, as dimensões do motor elétrico são determinadas pelos valores calculados de corrente e fluxo magnético ou pelo torque nominal do motor elétrico. Potência nominal do motor

onde P.n — potência nominal, kW, Mn- momento nominal, N • m, nn- velocidade nominal, rpm.
A potência nominal para o mesmo tamanho de motor aumenta à medida que sua velocidade nominal aumenta. Portanto, os motores elétricos de baixa velocidade são maiores que os motores de alta velocidade com a mesma potência.
Ao retificar furos pequenos, são necessárias velocidades muito altas do fuso de retificação para obter velocidades de corte adequadas. Assim, ao retificar com um rebolo de 3 mm de diâmetro a uma velocidade de apenas 30 m / s, a velocidade do fuso deve ser igual a 200.000 rotações por minuto. Em altas velocidades do fuso, a força de fixação pode ser reduzida drasticamente. Ao mesmo tempo, a retificação do rebolo e a dobra do mandril são reduzidas, e o acabamento da superfície e a precisão da usinagem são aumentados.
Em conexão com o exposto, a indústria utiliza vários modelos dos chamados. Fusos elétricos com velocidades de rotação de 12.000-144.000 rpm e superiores. O eletromandril (Fig. 3, a) é um fuso de retificação em rolamentos com um motor de gaiola de esquilo de alta frequência integrado. O rotor do motor está localizado entre dois mancais na extremidade do fuso oposta ao rebolo.
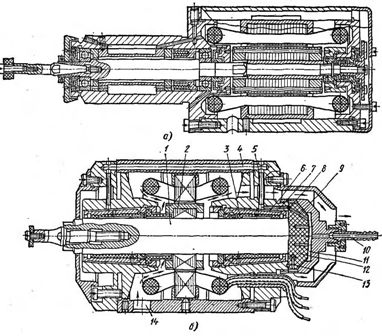
Arroz. 3. Eletrofusos
O estator elétrico do fuso é montado em chapa de aço elétrico. Uma bobina bipolar é colocada sobre ele.O rotor do motor em velocidades de até 30.000-50.000 rpm também é discado de chapa metálica e fornecido com um enrolamento de curto-circuito convencional. Eles tendem a reduzir o diâmetro do rotor tanto quanto possível.
A escolha do tipo de rolamento é de particular importância para a operação de eletromandris. Rolamentos de esferas de precisão são comumente usados, que operam com uma pré-carga criada usando molas calibradas. Esses rolamentos são usados para velocidades de rotação que não excedam 100.000 rotações por minuto.
Mancais aerostáticos são amplamente utilizados na indústria (Fig. 3, b). O eixo 1 do motor elétrico de alta frequência gira em mancais 3 lubrificados a ar. A carga axial é absorvida pela almofada de ar entre a ponta do eixo e o mancal de apoio 12, contra o qual o eixo é pressionado sob a pressão do ar fornecido ao interior da carcaça através do orifício 14 para resfriamento do motor. o ar comprimido passa pelo filtro e entra pelo encaixe 10 na câmara 11. Daqui, pelo canal 9 e pela ranhura circular 8, o ar passa para o canal 7 e a câmara 6. A partir daí, o ar entra no mancal brecha. O ar é fornecido ao mancal esquerdo através dos tubos 5 e canais 4 na carcaça do motor.
O ar de exaustão é descarregado através dos canais 13. A almofada de ar na folga do mancal de suporte é criada pelo ar que passa da câmara 11 através do mancal feito de grafite de carbono poroso. Cada rolamento tem latão cônico. Um forro de grafite de carbono é pressionado nele, cujos poros são preenchidos com bronze. Antes de iniciar o eletromandril, o ar é fornecido e as almofadas de ar são formadas entre o mandril e as buchas. Isso elimina o atrito e o desgaste dos rolamentos durante a inicialização.Depois disso, o motor é ligado, a velocidade do rotor 2 atinge a velocidade nominal em 5-10 s. Quando o motor é desligado, o rotor 2 gira por inércia por 3-4 minutos. Para reduzir esse tempo, um freio elétrico é usado.
O uso de bolsas de ar reduz drasticamente as perdas por fricção no fuso elétrico, o consumo de ar é de 6-25 m3 / h.
Também foram utilizados eletromandris em rolamentos com lubrificação líquida. Sua operação requer circulação contínua de óleo sob alta pressão, caso contrário, o aquecimento dos mancais torna-se inaceitável.
A produção de motores elétricos de alta frequência requer fabricação precisa de peças individuais, balanceamento dinâmico do rotor, montagem precisa e garantia de estrita uniformidade da folga entre o estator e o rotor. A frequência da corrente que alimenta o motor elétrico de alta frequência é selecionada dependendo da velocidade necessária do motor elétrico:

onde nSe a frequência síncrona de rotação do motor elétrico, rpm, f é a frequência da corrente, Hz, p é o número de pólos, pois p = 1, então

Nas rotações síncronas dos fusos elétricos de 12.000 e 120.000 rpm, a frequência da corrente deve ser igual a 200 e 2.000 Hz, respectivamente.
Geradores especiais são usados para alimentar motores de alta frequência. Na fig. 4 mostra um gerador de indução síncrono trifásico. O estator do gerador tem slots largos e estreitos. A bobina de campo, localizada nas ranhuras largas do estator, é alimentada com corrente contínua. O campo magnético dos condutores desta bobina é fechado através dos dentes do estator e saliências do rotor conforme mostrado na fig. 4 com linha pontilhada.
Quando o rotor gira, o campo magnético que se move ao longo das saliências do rotor atravessa as voltas do enrolamento de corrente alternada localizado nas fendas estreitas do estator e induz um e alternado. etc. c. A frequência deste e. etc. v. depende da velocidade e do número de orelhas do rotor. As forças eletromotrizes induzidas pelo mesmo fluxo nos enrolamentos de campo se anulam devido à ativação iminente das bobinas. As bobinas de campo são alimentadas por um retificador conectado à rede elétrica. O estator e o rotor possuem núcleos magnéticos feitos de chapa de aço elétrico.
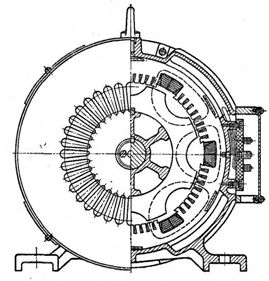
Arroz. 4. Gerador de indução de alta frequência
Geradores com o design descrito são produzidos para potência nominal de 1 a 3 kW e frequências de 300 a 2400 Hz. Os geradores são acionados por motores assíncronos com velocidade síncrona de 3000 rpm.
Os geradores de indução com frequência aumentada estão começando a ser substituídos por conversores de semicondutores (tiristores). Nesse caso, eles geralmente fornecem a capacidade de alterar a frequência da corrente e, portanto, a capacidade de ajustar a velocidade de rotação do motor elétrico. Se durante tal regulação a tensão for mantida constante, então a regulação de potência constante é executada. Se a relação entre tensão e frequência da corrente (e, portanto, o fluxo magnético do motor) for mantida constante, a regulação será realizada com uma constante em todas as velocidades por um longo tempo de torque permitido.
As vantagens dos acionamentos com conversor de frequência tiristorizado e motor assíncrono de gaiola são a alta eficiência e a facilidade de uso. A desvantagem ainda é o preço alto.Na engenharia mecânica, é mais recomendável usar esse tipo de inversor para motores de alta frequência. Acionamentos experimentais deste tipo foram criados em nosso país.
Motores assíncronos bifásicos de baixa potência são frequentemente usados em acionamentos executivos de máquinas-ferramenta. O estator desse motor possui dois enrolamentos: o enrolamento de campo 1 e o enrolamento de controle 2 (Fig. 5, a). O rotor 4 em uma gaiola de esquilo tem uma grande resistência ativa. Os eixos das bobinas são perpendiculares entre si.
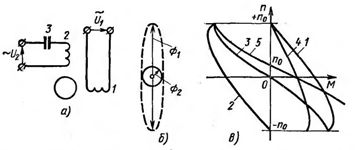
Arroz. 5. Esquema de um motor de indução bifásico e suas características
As tensões Ul e U2 são aplicadas aos enrolamentos. Quando o capacitor 3 é conectado ao circuito da bobina 2, a corrente nele excede a corrente na bobina 1. Nesse caso, um campo magnético elíptico rotativo é formado e o rotor 4 do esquilo começa a girar. Se você reduzir a tensão U2, a corrente na bobina 2 também diminuirá. Isso levará a uma mudança na forma da elipse do campo magnético rotativo, que se torna cada vez mais alongado (Fig. 5, b).
Um motor de campo elíptico pode ser considerado como dois motores em um eixo, um operando com um campo pulsante F1 e o outro com um campo circular F2. O motor de campo pulsante F1 pode ser pensado como dois motores de indução de campo circular idênticos conectados para girar em direções opostas.
Na fig. 5, c mostra as características mecânicas 1 e 2 de um motor de indução com um campo giratório circular e uma resistência ativa significativa do rotor ao girar em direções diferentes. A característica mecânica 3 de um motor monofásico pode ser construída subtraindo-se os momentos M das características 1 e 2 para cada valor de n.Em qualquer valor de n, o torque de um motor monofásico com alta resistência do rotor é interrompido. A característica mecânica do motor de campo circular é representada pela curva 4.
A característica mecânica 5 de um motor bifásico pode ser construída subtraindo os momentos M das características 3 e 4 em qualquer valor de n. O valor de n0 é a velocidade de rotação de um motor de indução bifásico em marcha lenta ideal. Ajustando a corrente de alimentação da bobina 2 (Fig. 5, a), é possível alterar a inclinação da característica 4 (Fig. 5, c) e, portanto, o valor de n0. Desta forma, é realizado o controle de velocidade de um motor de indução bifásico.
Ao operar com altos valores de escorregamento, as perdas no rotor tornam-se bastante significativas. Por este motivo, a regulação considerada é utilizada apenas para acionamentos auxiliares de baixa potência. Para reduzir o tempo de aceleração e desaceleração, são utilizados motores de indução bifásicos com rotor oco. Nesse motor, o rotor é um cilindro oco de alumínio de paredes finas.