Seleção de motores elétricos para acionamentos auxiliares de máquinas de corte de metal
 Acionamentos auxiliares em máquinas-ferramenta (acionamentos rápidos para pinças, coxins de cabeçote, braços transversais, etc.) normalmente operam em um modo de carga de curta duração. O modo de operação do acionamento elétrico de tal duração, no qual a temperatura de todos os dispositivos incluídos no acionamento elétrico não atinge um valor estacionário durante a operação e diminui para a temperatura ambiente durante uma pausa, é chamado de curto prazo.
Acionamentos auxiliares em máquinas-ferramenta (acionamentos rápidos para pinças, coxins de cabeçote, braços transversais, etc.) normalmente operam em um modo de carga de curta duração. O modo de operação do acionamento elétrico de tal duração, no qual a temperatura de todos os dispositivos incluídos no acionamento elétrico não atinge um valor estacionário durante a operação e diminui para a temperatura ambiente durante uma pausa, é chamado de curto prazo.
O tempo de operação dos acionamentos auxiliares em máquinas de corte de metal geralmente é curto; não excede 5 — 15 s, e somente para máquinas pesadas consegue 1 — 1,5 minutos. Durante este tempo (t < 0,1T) com uma sobrecarga dentro dos limites permitidos, o motor elétrico não tem tempo para aquecer até o superaquecimento normal. A potência nominal do motor elétrico neste caso é determinada pelas condições de sobrecarga.
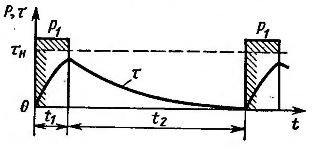
Arroz. 1. Curva de carga para operação de curto prazo
O momento de resistência Mc durante a operação de acionamentos auxiliares é criado principalmente por forças de atrito e, portanto, esses acionamentos, ao contrário dos acionamentos do movimento principal, requerem um torque inicial significativo.
Potência consumida para superar as forças de atrito ao mover um elemento de máquina em movimento horizontal:

onde Ftp — força de atrito, N; v — velocidade, m/s; G — a gravidade (peso) da unidade que está sendo movida, N; μ — coeficiente de atrito do movimento.
Potência do eixo do motor P = Ptr /η,
onde η — c. P. D. Transmissão, tipicamente η = 0,1 — 0,2.
O aquecimento do motor elétrico durante a operação no modo considerado é insignificante. Portanto, é recomendável usar sua sobrecarga permitida.
Potência nominal Pn = Ptr /(λη),
onde λ — coeficiente de sobrecarga admissível.
Grosso modo, pode-se considerar que a característica do motor em sua parte de trabalho é clara. Então a velocidade angular do motor em operação de sobrecarga
ωλ = ωО (1 — λсн),
onde, ωО = (πнО)/30- velocidade angular síncrona do motor elétrico.
Usando a fórmula Pn = Ptr /(λη), encontre o torque de sobrecarga do motor
O momento de resistência no início da partida do motor é maior do que durante sua operação. Este momento
onde μО — coeficiente de atrito em repouso.
O procedimento para selecionar motores elétricos dos acionamentos auxiliares da máquina
Primeiro, usando a fórmula Pn = Ptr /(λη) um motor elétrico é selecionado do catálogo, para o qual o torque de partida Mnach é então determinado. Calcule o momento Mso pela fórmula e compare com o momento Mnach.Se 0,85 Mnig> Mso, o motor selecionado é adequado para o acionamento auxiliar.
Os acionamentos para tornear e levantar unidades de máquinas são calculados de maneira semelhante, apenas no último caso, a carga principal geralmente é criada pela força da gravidade (peso) da unidade movida.
É de particular importância escolher a velocidade ideal para aproximar rapidamente a ferramenta da peça de trabalho. Ao aproximar-se da ferramenta, o movimento de alta velocidade é substituído por um movimento lento de velocidade de corte. Essa mudança de velocidade ocorre quando a ferramenta está a alguma distância da peça, caso contrário, a ferramenta atingirá a peça em alta velocidade e quebrará.
A transição de uma velocidade para outra leva algum tempo. Durante esse tempo, o equipamento elétrico é acionado e o movimento continua em alta velocidade.O tempo de resposta do equipamento muda devido a flutuações de tensão e influência de outros fatores aleatórios.
A velocidade ideal é fornecida pela seleção apropriada de engrenagens na cadeia cinemática. Uma redução adicional no tempo é possível por uma redução automática gradual ou suave da velocidade da seção final da estrada, o que permite adotar uma velocidade inicial mais alta.