O que é um transformador diferencial linear
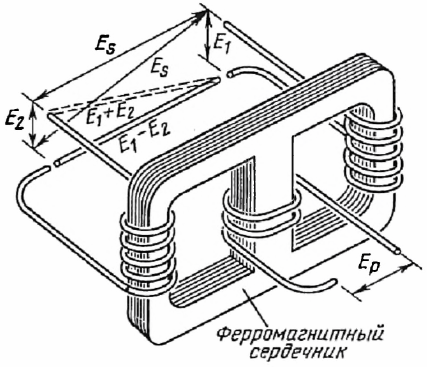
Uma corrente alternada fluindo em uma bobina primária pode ser usada para induzir uma tensão alternada em duas bobinas secundárias. Se os dois enrolamentos secundários forem idênticos em suas características e os dois caminhos das linhas do campo magnético que passam por essas bobinas também forem idênticos, as duas tensões secundárias geradas serão iguais. Um dispositivo com essa estrutura é chamado de transformador diferencial.

Um transformador diferencial pode ter um núcleo de ar ou um núcleo magnético.
Dois enrolamentos secundários podem ser conectados em fase ou antifase, no primeiro caso suas tensões são adicionadas uma à outra e no segundo caso uma é subtraída da outra.
Um enrolamento primário é usado para acionar dois enrolamentos secundários simétricos, o último dos quais pode ser conectado de modo que as tensões secundárias sejam adicionadas ou subtraídas uma da outra.
Se duas bobinas estiverem conectadas de acordo com um esquema de subtração, nos mesmos valores de suas tensões, a tensão secundária total será zero.Se as características do circuito magnético de uma dessas bobinas forem intencionalmente alteradas em comparação com as características do circuito magnético da outra bobina, as duas tensões secundárias serão diferentes e sua diferença não será zero.
Nessas condições, a fase da tensão secundária total indica qual caminho das linhas do campo magnético tem a maior resistência, enquanto a amplitude dessa tensão reflete o valor da diferença de relutância.
Se a mesma ação for usada para aumentar a resistência magnética de um caminho e diminuir a resistência magnética do outro caminho, a tensão de saída que reflete essa ação atinge seu valor máximo e a função de transferência terá a maior linearidade possível.
Como não há dois enrolamentos secundários e nem dois caminhos de linhas de campo magnético exatamente iguais, um transformador diferencial sempre tem uma tensão de saída definida, mesmo com sinal útil zero na entrada.
Além disso, as características dos circuitos magnéticos são não lineares. Como resultado dessa não linearidade, aparecem até mesmo componentes harmônicos da frequência fundamental da tensão de excitação primária aplicada, que não podem ser totalmente compensados em qualquer disposição dos enrolamentos secundários.
A relutância de um circuito ferromagnético de entreferro é uma função da largura do entreferro com forte não linearidade. Como resultado, a indutância de uma bobina enrolada em tal circuito também é uma função não linear da largura do intervalo.
Ao mesmo tempo, se houver dois caminhos mais ou menos idênticos das linhas do campo magnético, cada um com um entreferro, e se a largura de um entreferro aumentar à medida que a largura do outro diminui, então a diferença na resistência magnética desses os caminhos podem variar suficientemente linearmente.
Os princípios básicos do transformador diferencial são incorporados na prática em uma variedade de configurações de projeto específicas para muitos propósitos diferentes.
Transformador Diferencial Variável Linear (LVDT) é um transdutor passivo (sensor) que funciona com base no princípio de indução mútua e pode ser usado para medir deslocamento, deformação, pressão e peso.
Na maioria das vezes, eles podem usar NS para medir o deslocamento na faixa de vários milímetros a centímetros, convertendo diretamente o deslocamento em um sinal elétrico.
A indutância da bobina próxima ou dentro da qual está localizada a haste ferromagnética é função da coordenada da posição desta haste em relação à bobina com forte não linearidade.
Se essa haste for um circuito ferromagnético de algum transformador diferencial, a tensão diferencial secundária pode servir como um indicador do deslocamento da haste, dependendo linearmente desse deslocamento.
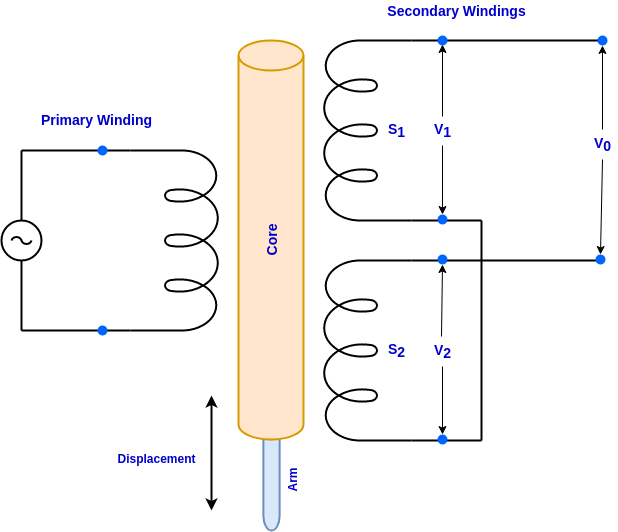
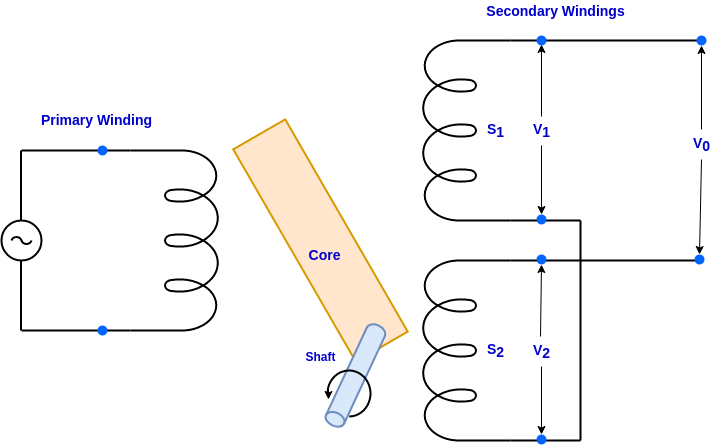
O enrolamento primário é conectado a uma fonte CA. Os dois enrolamentos secundários S1 e S2 têm o mesmo número de voltas e são montados em série opostos um ao outro.
Assim, o EMF induzido nesses enrolamentos está 180° fora de fase um do outro e, portanto, o efeito geral se cancela.

A posição do núcleo ferromagnético simétrico fornecido no projeto do transformador diferencial pode ser determinada a partir da fase e amplitude da tensão secundária.
A diferença absoluta entre as duas tensões secundárias indica o valor absoluto do deslocamento da haste em relação ao centro ou posição zero, e a fase dessa tensão diferente indica a direção do deslocamento.
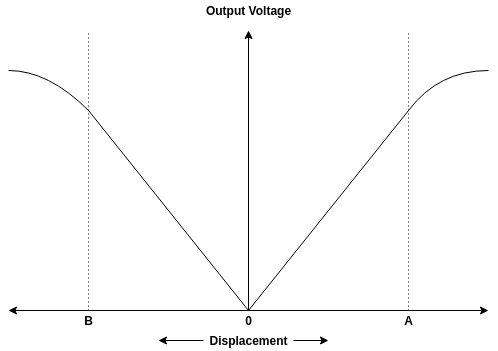
A curva B / I de um transformador diferencial variável linear é mostrada na figura.
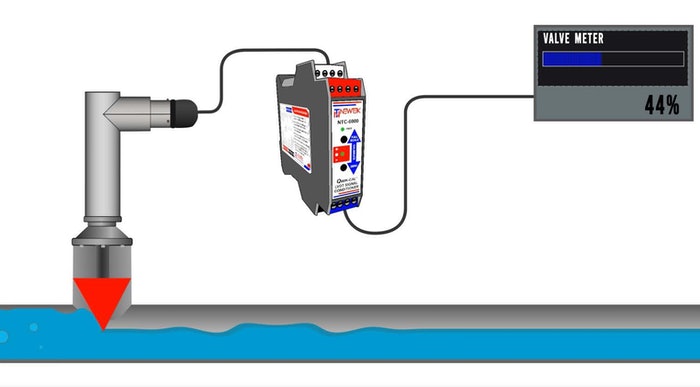
Um exemplo de uso de um transformador diferencial linear para fornecer feedback de posição preciso para monitoramento e controle de válvulas em fábricas de produtos químicos, usinas de energia e equipamentos agrícolas:
Sensores de deslocamento submersíveis LVDT D5W:
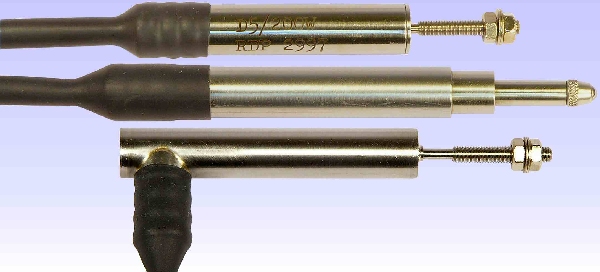
Esses transdutores são projetados para medir deslocamento e posição. Eles fornecem medição precisa da posição da armadura (parte deslizante) em relação ao invólucro do sensor de deslocamento.
Transdutores de deslocamento submersíveis são projetados para fazer medições enquanto imersos em líquidos adequados. Líquidos não magnéticos podem inundar o tubo da armadura sem afetar a operação do conversor. Esses conversores estão disponíveis em versões não controladas ou com retorno por mola.
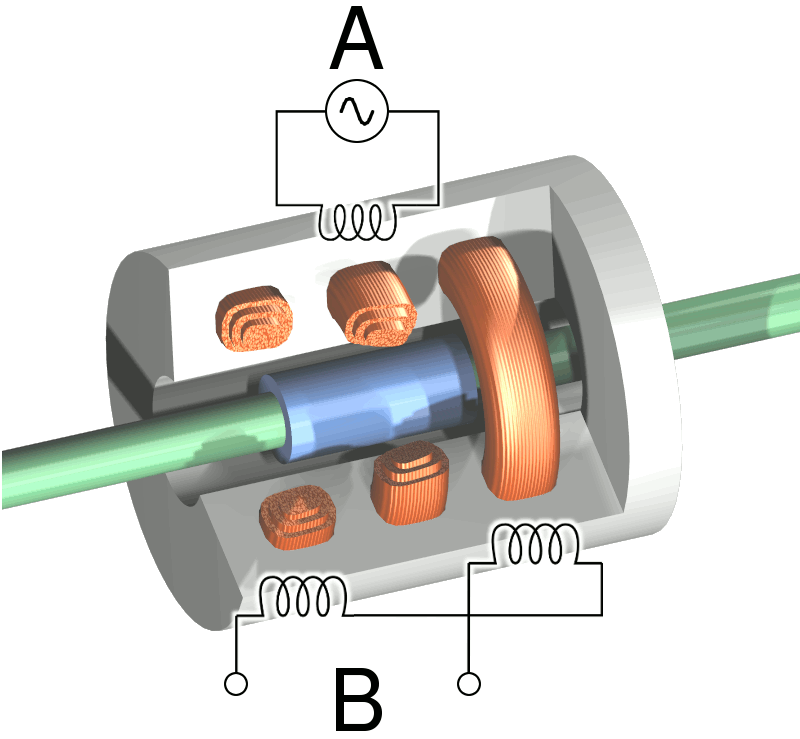
Ao automatizar vários processos tecnológicos, são frequentemente utilizados conversores bilaterais com um transformador diferencial com núcleo ferromagnético, que é inserido em suas extremidades em distâncias iguais nas duas bobinas secundárias.
À medida que a haste se move axialmente, ela se move mais profundamente em uma dessas bobinas e se estende da outra.A diferença absoluta entre as duas tensões secundárias indica o valor absoluto do deslocamento da haste em relação ao centro ou posição zero, e a fase dessa tensão diferente indica a direção do deslocamento.
Transformador Diferencial CA Rotativo:
Um transformador diferencial variável rotativo é um transformador passivo baseado no princípio de indução mútua. É usado para medir o deslocamento angular.
Seu projeto é semelhante ao de um transformador diferencial variável linear, exceto pela construção do núcleo.
O enrolamento primário é conectado a uma fonte CA. Os dois enrolamentos secundários S1 e S2 têm o mesmo número de voltas e são montados em série opostos um ao outro.
Vantagens do transformador diferencial linear:
-
Não há contato físico entre o núcleo e as bobinas;
- Alta fiabilidade;
-
Resposta rápida;
-
Longa vida útil.
É o sensor indutivo mais utilizado devido à sua alta precisão.