Medidores de fase - finalidade, tipos, dispositivo e princípio de ação
 Um dispositivo de medição elétrica é chamado de medidor de fase, cuja função é medir o ângulo de fase entre duas oscilações elétricas de frequência constante. Por exemplo, usando um medidor de fasor, você pode medir o ângulo de fase em uma rede de tensão trifásica. Os medidores de fase são freqüentemente usados para determinar o fator de potência, cosseno phi, de qualquer instalação elétrica. Assim, os medidores de fase são amplamente utilizados no desenvolvimento, comissionamento e operação de vários dispositivos e aparelhos elétricos e eletrônicos.
Um dispositivo de medição elétrica é chamado de medidor de fase, cuja função é medir o ângulo de fase entre duas oscilações elétricas de frequência constante. Por exemplo, usando um medidor de fasor, você pode medir o ângulo de fase em uma rede de tensão trifásica. Os medidores de fase são freqüentemente usados para determinar o fator de potência, cosseno phi, de qualquer instalação elétrica. Assim, os medidores de fase são amplamente utilizados no desenvolvimento, comissionamento e operação de vários dispositivos e aparelhos elétricos e eletrônicos.
Quando o fasor é conectado ao circuito medido, o dispositivo é conectado ao circuito de tensão e ao circuito de medição de corrente. Para uma rede de alimentação trifásica, o fasor é conectado por tensão a três fases e por corrente aos enrolamentos secundários de transformadores de corrente também em três fases.
Dependendo do dispositivo do medidor de fase, também é possível um esquema simplificado de sua conexão, quando também está conectado a três fases por tensão e por corrente - a apenas duas fases.A terceira fase é então calculada adicionando os vetores de apenas duas correntes (duas fases medidas). Finalidade do medidor de fase - medição cosseno phi (fator de potência), portanto, em linguagem comum, também são chamados de «metros de cosseno».
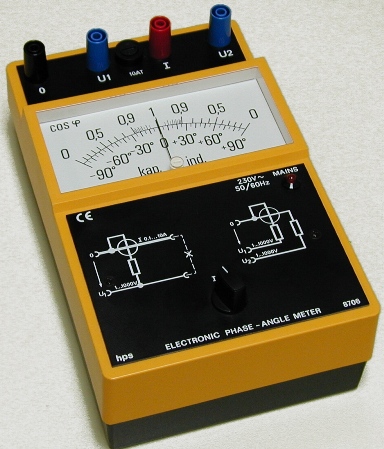
Hoje você pode encontrar medidores de fase de dois tipos: eletrodinâmicos e digitais. Os medidores de fase eletrodinâmicos ou eletromagnéticos são baseados em um esquema simples com um mecanismo proporcional para medir a mudança de fase. Dois pórticos rigidamente fixados um ao outro, cujo ângulo é de 60 graus, são fixados nos eixos dos suportes e não há momento mecânico oposto.
Sob certas condições, que são definidas alterando o deslocamento de fase das correntes nos circuitos desses dois quadros, bem como o ângulo de fixação desses quadros entre si, a parte móvel do dispositivo de medição é girada em um ângulo igual ao ângulo de fase. A escala linear do dispositivo permite registrar o resultado da medição.
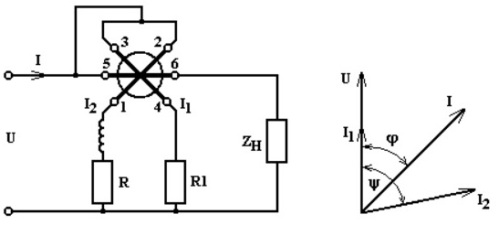
Vejamos o princípio de operação de um medidor de fase eletrodinâmica. Possui uma bobina fixa de corrente I e duas bobinas móveis. As correntes I1 e I2 fluem através de cada uma das bobinas móveis. As correntes que fluem criam fluxos magnéticos tanto na bobina estacionária quanto nas bobinas móveis. Consequentemente, os fluxos magnéticos interativos das bobinas geram dois torques M1 e M2.
Os valores desses momentos dependem da posição relativa das duas bobinas, do ângulo de rotação da parte móvel do dispositivo de medição, e esses momentos são direcionados em direções opostas.Os valores médios dos momentos dependem das correntes que circulam nas bobinas móveis (I1 e I2), da corrente que circula na bobina estacionária (I), dos ângulos de defasagem das correntes das bobinas móveis em relação ao corrente na bobina estacionária (ψ1 e ψ2 ) e nos enrolamentos dos parâmetros de projeto.
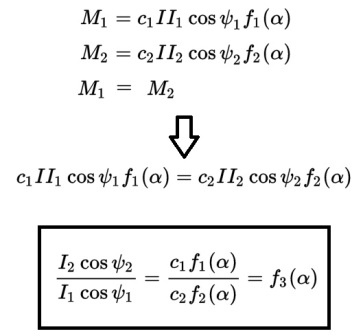
Com isso, a parte móvel do dispositivo gira sob a ação desses momentos até que ocorra o equilíbrio, causado pela igualdade dos momentos resultantes da rotação. A escala do medidor de fase pode ser calibrada em termos de fator de potência.
As desvantagens dos medidores de fase eletrodinâmicos são a dependência das leituras da frequência e o consumo significativo de energia da fonte estudada.
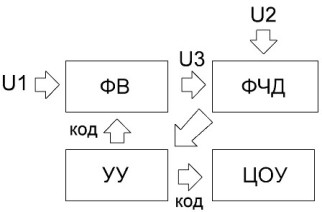
Os medidores de fase digital podem ser implementados de várias maneiras. Por exemplo, um medidor de fase de compensação tem um alto grau de precisão mesmo que seja executado no modo manual. No entanto, considere como ele funciona. Existem duas tensões senoidais U1 e U2, a mudança de fase entre as quais você precisa saber.
A tensão U2 é fornecida ao defasador (PV), que é controlado pelo código da unidade de controle (UU). A mudança de fase entre U3 e U2 é gradualmente alterada até que seja alcançada uma condição em que U1 e U3 estejam em fase. Ao ajustar o sinal da mudança de fase entre U1 e U3, o detector sensível à fase (PSD) é determinado.
O sinal de saída do detector sensível à fase é enviado para a unidade de controle (CU). O algoritmo de balanceamento é implementado usando o método de código de pulso. Após a conclusão do processo de balanceamento, o código do fator de deslocamento de fase (PV) expressará o deslocamento de fase entre U1 e U2.
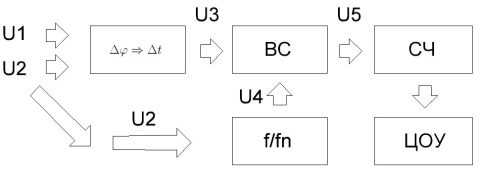
A maioria dos medidores de fase digitais modernos usa o princípio da contagem discreta.Esse método funciona em duas etapas: converter a mudança de fase em um sinal de certa duração e, em seguida, medir a duração desse pulso usando um número discreto. O dispositivo contém um conversor de fase para pulso, um seletor de tempo (VS), um pulso de modelagem discreta (f / fn), um contador (MF) e um DSP.
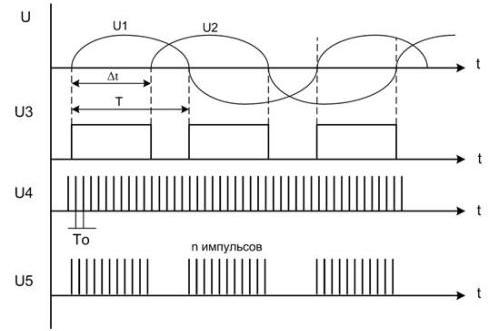
Um conversor fase-a-pulso é formado por U1 e U2 com um deslocamento de fase Δφ pulsos retangulares U3 como uma sequência. Esses pulsos U3 têm uma taxa de repetição e um ciclo de trabalho correspondente à frequência e deslocamento de tempo dos sinais de entrada U1 e U2. Os pulsos U4 e U3 formam pulsos de detecção discretos de período T0 que são aplicados ao seletor de tempo. O seletor de tempo, por sua vez, abre durante o pulso U3 e alterna entre os pulsos U4. Como resultado da saída do seletor de tempo, são obtidas rajadas de pulsos U5, cujo período de repetição é T.
O contador (MF) conta o número de pulsos no pacote serial U5, com o resultado de que o número de pulsos recebidos no contador (MF) é proporcional ao deslocamento de fase entre U1 e U2. O código do contador é enviado ao centro de controle central, e as leituras do aparelho são exibidas em graus com precisão de décimos, o que é alcançado pelo grau de discrição do aparelho. O erro de discrição está relacionado à capacidade de medir Δt com uma precisão de um período de contagem de pulso.
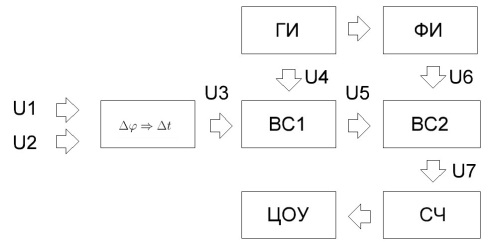
Os medidores eletrônicos de fase eletrônicos com média de cosseno phi podem reduzir o erro calculando a média de vários períodos T do sinal de teste.A estrutura do medidor digital de fase média difere da contagem discreta do circuito pela presença de mais um seletor de tempo (BC2), além de um gerador de pulsos (GP) e um gerador de pulsos discretos (PI).
Aqui, o conversor de deslocamento de fase U5 inclui um gerador de pulsos (PI) e um seletor de tempo (BC1). Por um período de tempo Tk calibrado, muito maior que T, vários pacotes são alimentados ao dispositivo, na saída dos quais vários pacotes são formados, isso é necessário para calcular a média dos resultados.
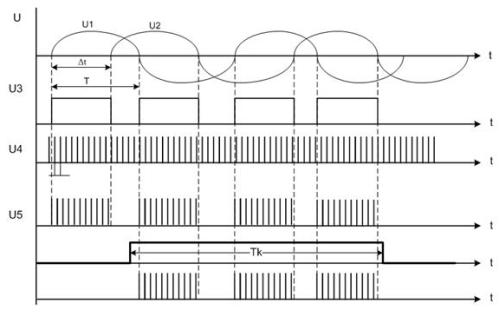
Os pulsos U6 têm uma duração que é um múltiplo de T0, pois o modelador de pulso (PI) funciona com base no princípio de dividir a frequência por um determinado fator. Os pulsos do sinal U6 abrem o seletor de tempo (BC2). Como resultado, vários pacotes chegam à sua entrada. O sinal U7 é alimentado ao contador (MF) que está conectado ao centro de controle central. A resolução do dispositivo é determinada pelo conjunto de U6.
O erro do medidor de fase também é afetado pela baixa precisão de fixação do deslocamento de fase pelo conversor durante o intervalo de tempo dos momentos de transição dos sinais U2 e U1 por meio de zeros. Mas essas imprecisões são reduzidas ao calcular a média do resultado dos cálculos para um período Tk, que é muito maior que o período dos sinais de entrada estudados.
Esperamos que este artigo tenha ajudado você a obter uma compreensão geral de como funcionam os medidores de fase. Você sempre pode encontrar informações mais detalhadas na literatura especial, da qual, felizmente, há muito hoje na Internet.