Equipamentos elétricos de elevadores
 Um elevador é uma máquina de elevação cíclica projetada para elevação vertical de pessoas e mercadorias. Com hora marcada, os elevadores são divididos em passageiro, carga-passageiro, hospital, carga.
Um elevador é uma máquina de elevação cíclica projetada para elevação vertical de pessoas e mercadorias. Com hora marcada, os elevadores são divididos em passageiro, carga-passageiro, hospital, carga.
Dependendo da velocidade do carro, os elevadores são divididos em baixa velocidade (até 0,71 m/s), alta velocidade (de 1 a 1,6 m/s), alta velocidade (de 2 a 4 m/s) e alta velocidade (4 — 10 m / s) ... A capacidade de carga dos elevadores de passageiros é de 320 a 1600 kg, elevadores de carga - de 160-5000 kg. A uma velocidade de até 1,6 m / s, o motor elétrico é conectado ao feixe de tração por meio de uma caixa de engrenagens; se a velocidade for maior, são usados acionamentos elétricos sem engrenagem.

Com uma ampla variedade de opções de design para elevadores de passageiros e de carga, os principais dispositivos para eles são guincho, cordas, carro, contrapeso, freio mecânico e equipamentos de controle. Os elevadores modernos possuem um sistema de suspensão de contrapeso e uma corda de contrapeso.

A cabine se move ao longo de trilhos verticais.A cabine é suspensa pelas cordas que envolvem o cabo de reboque e guiam as polias do acionamento do guincho elétrico. Nas pontas da corda existe um contrapeso que se move ao longo das guias. A massa do contrapeso é igual à soma da massa da cabine e (0,42 — 0,5) a massa da carga (ou metade da carga mais provável da cabine).
Acionamentos de elevador
Em elevadores e monta-cargas, os tipos de acionamentos elétricos são selecionados em função da velocidade de movimento, do número de andares do edifício e da precisão de frenagem necessária. Os seguintes acionamentos elétricos estão atualmente em uso:
a) para edifícios de até 17 andares, são utilizados elevadores de baixa e alta velocidade com velocidade de 0,7 a 1,4 m / s com capacidade de carga de 320, 400 kg. Esses elevadores usam um acionamento elétrico com um motor elétrico assíncrono de duas velocidades com um rotor em uma gaiola de esquilo,
b) para elevadores de passageiros de alta velocidade com velocidade de 1,6 m / s, destinados a edifícios de até 25 andares, acionamento elétrico de acordo com o sistema regulador de tensão tiristor (TRN) com motor assíncrono de duas velocidades (TRN-ADD ) é usado.

A presença de um acionamento elétrico ajustável garante alta suavidade nos processos de aceleração e desaceleração, alta precisão de parada no chão (até 20 mm) e ausência de seção com velocidade reduzida antes da parada. O segundo enrolamento do motor é usado para atingir baixa velocidade durante a revisão,
c) para elevadores de alta velocidade e alta velocidade, são utilizados acionamentos elétricos constantes de acordo com o sistema do motor do conversor de tiristor-TP-D e corrente alternada de acordo com o sistema do motor elétrico assíncrono de curto-circuito do conversor de frequência GGCH-AD.
Acionamento elétrico por tiristor de elevador tipo ULMP-25-16
A alimentação do acionamento elétrico (Fig. 1) é realizada por um regulador de tensão tiristor reversível UZ (TRN) na inicialização e movimento uniforme e por um retificador separado montado de acordo com um circuito de ponte monofásica UZ1 para alimentar o enrolamento do estator durante a frenagem dinâmica.
O sistema fornece controle de fase paramétrico da velocidade de rotação de um motor de indução tipo gaiola de esquilo. O sistema de controle automático é feito em um microcomputador de chip único do tipo KR1816VB031, que realiza o controle digital direto da velocidade de rotação de um motor elétrico assíncrono de duas velocidades.
O sistema de controle automático garante alta precisão de manutenção da velocidade definida e parada no nível do piso necessário diretamente ao ponto de ajuste sem uma seção com velocidade reduzida. O segundo enrolamento do motor é ligado apenas durante a revisão.
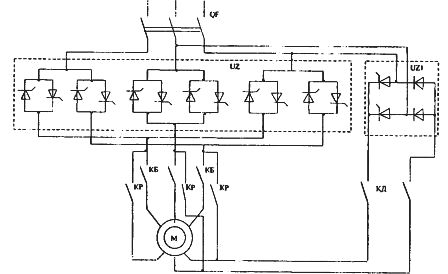
Arroz. 1. Esquema do acionamento elétrico do tiristor do elevador
solenóides de freio
Os mecanismos de elevação dos elevadores são equipados com dispositivos de frenagem especiais com eletroímãs de corrente contínua de curto e curto curso, que são conectados a uma rede de 220 ou 380 V por meio de um retificador.
Dispositivos de controle de elevador
Interruptores de piso projetados para comutação de circuitos de controle de movimento. Eles registram a posição do carro, selecionam automaticamente a direção do movimento («para cima» ou «para baixo») e dão um comando para desligar o acionamento elétrico ao frear.Estruturalmente, estes são interruptores de alavanca de três pontos (1-0-2) de três posições (dispositivos de controle de movimento) com contatos móveis (na alavanca) para fixos (no corpo).
Os interruptores de piso são montados no eixo ao nível do piso e existe um ramal moldado na cabine que atua na alavanca do interruptor de piso.
Quando a cabine se move "para cima" girando a alavanca, um grupo de contatos fixos se fecha e "para baixo" - outro. Quando a cabina está ao nível do piso, o interruptor do piso está na posição neutra «O» e os contactos fixos estão abertos.

Os interruptores de velocidade são projetados para dar um impulso para reduzir a velocidade antes de parar o veículo. São utilizados em elevadores de alta velocidade com acionamento elétrico com execução em duas velocidades. Eles são construídos com base no princípio dos interruptores de piso, mas têm um design diferente. Os interruptores de velocidade são instalados no poço da mina como um conjunto completo acima e abaixo do piso a uma distância de 0,5 a 0,6 m.
Os interruptores de alavanca são projetados para operar elevadores de carga controlados. Estruturalmente, são interruptores de alavanca de três posições com retorno automático da alavanca para a posição neutra ("topo" -0- "fundo"), montados na cabine. Ao girar a manivela, a direção do movimento é selecionada, o que é obtido fechando um par de contatos fixos. Ao soltar a manopla, os contatos se abrem e o motor para (desliga). As chaves são usadas simultaneamente como chave fim de curso nas posições finais da cabine. Isso é conseguido pela ação da alavanca no rolo de guias especiais no poço da mina.
Sensores indutivos projetados para uso em elevadores de alta velocidade. O diagrama de tais sensores para corrente alternada e retificada é mostrado na Fig. 2.
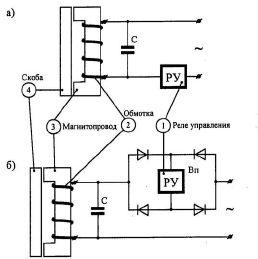
Arroz. 2. Diagrama esquemático de sensores indutivos de corrente alternada (a) e retificada (b)
Um circuito magnético laminado em forma de U feito de aço 3 é instalado no poço da mina, e há um suporte de aço 4 na cabine, que é um shunt magnético. No circuito magnético existe uma bobina com enrolamento 2, à qual o relé de controle 1 está conectado diretamente ou através de um retificador Vp. Quando a braçadeira sai (o circuito magnético se abre), a resistência indutiva da bobina é pequena, o que garantirá o funcionamento do relé de controle. Se o suporte de aço se sobrepõe ao circuito magnético, a resistência indutiva da bobina aumenta acentuadamente e o relé é liberado.
A confiabilidade e clareza de operação do relé de controle são garantidas pela inclusão da capacitância C em paralelo com a bobina, que é selecionada a partir da condição de obtenção de um modo próximo à ressonância das correntes. O uso de um retificador para alimentar o relé de controle aumenta a confiabilidade da operação do sistema magnético do relé.
Além disso, dispositivos de contato hermético (reed switches) são amplamente utilizados em sensores de deslocamento. O uso de sensores indutivos elimina as desvantagens dos interruptores de piso e interruptores de velocidade, como ruído e interferência de rádio decorrentes da operação de dispositivos de contato.
A camada magnética é um dispositivo eletromagnético instalado na cabine e que controla o funcionamento das fechaduras das portas da mina. O limitador de ramo magnético é conectado à armadura do eletroímã de ramo.Quando a cabine está no chão, o eletroímã do ramal é desaerado, o detentor acionado por mola desengata a trava da porta da mina, permitindo que ela abra.
Ao se mover, o eletroímã do ramal é energizado - a trava é introduzida, o que proíbe a abertura da porta. Tais fechaduras são utilizadas em elevadores de projeto antigo (ou modernizado) com acionamento manual da porta do poço.

automação de elevadores
A principal diferença entre a operação de elevadores e talhas é sua posição multiposição, que se expressa no fato de que os mecanismos podem ocupar um grande número de posições fixas. Portanto, após cada parada é necessário resolver o problema lógico de escolher o próximo movimento. A solução para este problema é atualmente implementada usando chips lógicos e microprocessadores. As seguintes tarefas são definidas para o esquema de controle do elevador: controle da posição do carro no poço, seleção automática da direção do movimento, determinação do horário de início da parada, parada precisa do carro no andar, abertura automática e fechamento de portas e proteção de acionamentos elétricos e elevador.
Os sinais de comando que definem o programa de movimento do carro são divididos em dois tipos: "ordens" vindas do carro e "chamadas" vindas da plataforma de pouso. Os comandos são dados por meio de botões localizados nas áreas do cockpit e do piso, respectivamente. Dependendo da resposta aos comandos e dos métodos de processamento, os esquemas de controle separados e coletivos diferem.Com um princípio de controle separado, o circuito percebe e executa apenas um comando e durante sua execução não responde a outras ordens e chamadas.
Este esquema é o mais simples de implementar, mas limita as possíveis características do elevador e, portanto, é usado apenas para elevadores em edifícios residenciais de até nove andares com um fluxo relativamente pequeno de passageiros. Com o princípio do controle coletivo, o circuito recebe vários comandos simultaneamente e os executa em uma determinada sequência, geralmente na ordem dos andares.

A base do sistema de controle do elevador é a medição do relógio do andar. O estudo do relógio pode ser um pêndulo, quando a fixação é realizada em duas direções, de baixo para cima e de cima para baixo, e em uma direção, por exemplo, apenas de cima para baixo. O balanço do pêndulo é usado com mais frequência.