Seleção de motores elétricos para equipamentos com diferentes tipos de carga e modos de operação
 A seleção correta de motores elétricos para mecanismos de produção garante sua operação contínua e confiável durante toda a vida útil padrão. Este é um processo muito importante, onde muitos fatores e critérios diferentes devem ser considerados. Um dos fatores mais importantes é a consideração da natureza e tipo de carga.
A seleção correta de motores elétricos para mecanismos de produção garante sua operação contínua e confiável durante toda a vida útil padrão. Este é um processo muito importante, onde muitos fatores e critérios diferentes devem ser considerados. Um dos fatores mais importantes é a consideração da natureza e tipo de carga.
Aqui estão todos os critérios a considerar ao escolher: Como escolher o motor elétrico certo
Ao escolher motores elétricos para várias máquinas, instalações e máquinas, é necessário levar em consideração os diferentes tipos de carga, o tipo de características mecânicas, a natureza e a duração dos ciclos de trabalho desses mecanismos.
Sabendo como vai mudar a carga no eixo do motor elétrico selecionado, é possível determinar com precisão como vão mudar as perdas de potência durante a operação e, graças a isso, escolher um motor elétrico que, trabalhando com uma determinada carga, não superaqueça . A temperatura máxima de aquecimento do isolamento do motor elétrico não excederá o valor permitido durante todo o ciclo de trabalho.
A seleção incorreta de motores elétricos de mecanismos de produção leva à interrupção dos processos de produção e leva a perdas de produtos fabricados e custos adicionais de eletricidade.
Equipamentos elétricos com motores elétricos devem atender totalmente aos requisitos do processo tecnológico.
A escolha de um dos tipos de motores elétricos do catálogo é considerada correta se as seguintes condições forem atendidas:
-
a correspondência mais completa do motor elétrico com a máquina de trabalho (mecanismo de acionamento) em termos de propriedades mecânicas. Isso significa que o motor elétrico deve ter uma característica mecânica que possa fornecer ao acionamento os valores necessários de velocidade e aceleração em estado estacionário e transitório;
-
aproveitamento máximo da potência do motor elétrico em todos os modos de operação. A temperatura de todas as partes ativas do motor elétrico nos modos de operação mais severos deve estar o mais próximo possível da temperatura de aquecimento permitida, mas não excedê-la;
-
compatibilidade do motor elétrico com o acionamento e as condições ambientais em termos de projeto;
-
conformidade do motor elétrico com os parâmetros da fonte de alimentação.
Para escolher um motor elétrico, são necessários os seguintes dados:
-
tipo e nome do mecanismo de acionamento;
-
potência máxima do eixo, se o modo de operação for contínuo e a carga for constante e, nos demais casos, gráficos de variações de potência ou momento de resistência do eixo em função do tempo;
-
frequência rotacional (ou faixa de frequência rotacional) do eixo de acionamento;
-
método de articulação do mecanismo de acionamento com o eixo do motor elétrico (na presença de transmissões cinemáticas, o tipo de transmissão e a relação de transmissão são indicados);
-
a quantidade de torque de partida que o motor elétrico deve fornecer ao eixo de acionamento;
-
limites de regulação de velocidade (valores superiores e inferiores e valores correspondentes de potência e torque);
-
qualidade exigida (suavidade, gradação) de controle de velocidade;
-
frequência de ativação do drive dentro de uma hora;
-
características do ambiente externo.
A seleção de um motor elétrico com base na consideração de todas as condições e dados nominais é realizada de acordo com os catálogos.

Os possíveis modos de operação dos acionamentos elétricos se distinguem por uma grande variedade em termos de natureza e duração dos ciclos, valores de carga, condições de resfriamento, proporção de perdas iniciais e funcionamento suave, etc., portanto, a produção de motores elétricos para cada dos possíveis modos de operação de um acionamento elétrico não faz sentido prático.
Com base na análise dos modos reais, é identificada uma classe especial de modos — modos nominais, para os quais os motores seriais são projetados e fabricados.
Os dados contidos no passaporte de uma máquina elétrica referem-se a um determinado modo nominal e são chamados de dados nominais de uma máquina elétrica.
Os fabricantes garantem que, quando o motor elétrico opera no modo nominal com carga nominal, ele é totalmente utilizado termicamente.
O GOST atual fornece 8 modos nominais, que de acordo com a classificação internacional possuem símbolos S1 — S8.
Serviço contínuo S1 — operação da máquina em carga constante por tempo suficiente para atingir uma temperatura constante de todas as suas partes.
Serviço de curto prazo S2 — operação da máquina em carga constante por um tempo insuficiente para que todas as partes da máquina atinjam a temperatura definida, seguida de parada da máquina por um tempo suficiente para resfriá-la a uma temperatura não superior a 2 °C da temperatura ambiente. Para trabalhos de curta duração, a duração do período de trabalho é de 15, 30, 60, 90 minutos.
Serviço intermitente S3 — uma sequência de ciclos de trabalho idênticos, cada um dos quais inclui o tempo de operação de carga contínua durante o qual a máquina não aquece até a temperatura definida e o tempo de estacionamento durante o qual a máquina não esfria até a temperatura ambiente.
Nesse modo, o ciclo de trabalho é tal que a corrente de partida não afeta significativamente o aumento de temperatura. O tempo de ciclo é insuficiente para alcançar o equilíbrio térmico e não excede 10 minutos. A moda é caracterizada pelo valor da duração da inclusão em porcentagens:
Os motores produzidos pela indústria para esse modo de operação são caracterizados por um ciclo de trabalho (PV), que é definido pela duração de um ciclo de trabalho
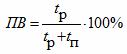
onde tp é o tempo de funcionamento do motor; tp — tempo de pausa.
Valores padronizados da duração da inclusão: 15, 25, 40, 60% ou valores relativos da duração do período de trabalho: 0,15; 0,25; 0,40; 0,60. Para o modo S3, os dados nominais correspondem apenas a um determinado ciclo de trabalho e referem-se ao período de trabalho.
Os modos S1 — S3 são atualmente os principais, cujos dados nominais são incluídos pelas fábricas locais de veículos elétricos nos catálogos e passaporte da máquina.
Leia mais sobre isso aqui: Modos de operação de motores elétricos
Para uma seleção razoável do motor em termos de potência, é necessário saber como a carga do eixo do motor muda ao longo do tempo, o que por sua vez permite avaliar a natureza da mudança nas perdas de potência.
Além disso, é necessário estabelecer como ocorre o processo de aquecimento do motor em decorrência da liberação de perdas de energia nele. Essa abordagem permite escolher o motor de forma que a temperatura máxima do isolamento do enrolamento não exceda o valor permitido. Esta condição é uma das principais para garantir o funcionamento confiável do motor ao longo de sua vida útil.
A escolha da potência do motor elétrico deve ser feita de acordo com a natureza das cargas na máquina de trabalho. Este personagem é avaliado por dois motivos:
-
de acordo com o modo nominal de operação;
-
através de mudanças na quantidade de energia consumida.
A potência do motor deve atender a três condições:
-
aquecimento normal durante a operação;
-
capacidade de sobrecarga suficiente;
-
torque de partida suficiente.
A escolha de motores elétricos com os chamadosA "reserva de energia", baseada na maior carga possível de acordo com o cronograma, leva à subutilização do motor elétrico e, portanto, ao aumento dos custos de capital e custos operacionais devido à redução dos fatores de potência e eficiência. O aumento excessivo da potência do motor também pode levar a solavancos durante a aceleração.
Se o motor elétrico deve funcionar por muito tempo com uma carga constante ou ligeiramente variável, determinar sua potência não é difícil e é realizado de acordo com as fórmulas. É muito mais difícil escolher a potência dos motores elétricos em outros modos de operação.

A carga de curto prazo é caracterizada pelo fato de que os períodos de inclusão são curtos e as pausas são suficientes para o resfriamento completo do motor elétrico. Neste caso, assume-se que a carga do motor elétrico durante os períodos de comutação permanece constante ou quase constante.
Para que o motor elétrico seja utilizado corretamente para aquecimento neste modo, é necessário escolhê-lo de forma que sua potência contínua (indicada nos catálogos) seja menor que a potência correspondente à carga de curto prazo, ou seja, o motor elétrico sofre uma sobrecarga térmica durante os períodos de sua operação de curto prazo...
Se os períodos de operação do motor elétrico forem significativamente menores que o tempo necessário para seu aquecimento completo, mas as pausas entre os períodos de ativação forem significativamente menores que o tempo de resfriamento completo, haverá carregamento repetido de curto prazo.
Cálculo de potência e seleção de motor para operação contínua
Com uma carga de eixo constante ou ligeiramente variável, a potência do motor deve exceder apenas ligeiramente a potência da carga.Neste caso, a condição deve ser satisfeita
Pn ≥ P,
onde Pn é a potência nominal do motor; P — potência de carga. Escolher um motor se resume a escolhê-lo no catálogo.
Seleção da potência do motor para operação contínua. Se o torque e a potência do mecanismo de produção não mudarem, deve-se selecionar um motor com potência nominal Pn igual à potência da carga, levando em consideração as perdas na transmissão (redutor):
Pn ≥ Pm /ηt, W
onde ηt é a eficiência da transmissão (caixa de câmbio).
Em um determinado momento de resistência do mecanismo de acionamento Ms, N ∙ me a frequência de rotação do eixo de saída da caixa de engrenagens n2, rpm
Pm = Mc ∙ ω2, W
onde ω2 = 2π ∙ n2 / 60, rad / s
Para alguns mecanismos de produção operando em modo contínuo com momento constante de resistência do eixo, existem fórmulas aproximadas para determinar a potência dos motores.
Cálculo de potência e seleção de motor para carga de curto prazo
Os motores para operação de curto prazo do acionamento elétrico são selecionados de acordo com sua potência nominal, que deve ser igual à potência de carga, levando em consideração a duração da operação. Os valores padrão permitidos para motores produzidos pela indústria para operação de curto prazo são 10, 30, 60, 90 minutos.
Na ausência de motores de serviço intermitente, podem ser instalados motores de serviço intermitente. Nesse caso, um tempo de operação de 30 minutos corresponde a um ciclo de trabalho = 15%, 60 minutos corresponde a um ciclo de trabalho = 25% e 90 minutos corresponde a um ciclo de trabalho = 40%.Como último recurso, é possível utilizar motores para operação contínua com Pn < P e sua posterior verificação das condições térmicas.
Cálculo de potência e seleção de motor para carga intermitente
Para um acionamento elétrico operando em modo intermitente, a potência do motor é calculada usando o método de perda média ou valores equivalentes. O primeiro método é mais preciso, mas mais trabalhoso. É mais conveniente usar o método de valores equivalentes. Dependendo do cronograma de carga fornecido P = f (t), M = f (t), I = f (t), os valores quadrados médios são determinados, que são denominado equivalente.
Potência equivalente é a potência RMS do diagrama de carga
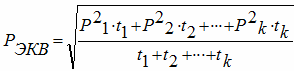
onde t1, t2, …, tk — intervalos de tempo em que a potência da carga é igual a P1, P2, …, Pk, respectivamente.
De acordo com o catálogo, para os valores obtidos de Reqv e PV, a potência nominal do motor é selecionada a partir da condição Pn ≥ REKV.
Se o diagrama M = f (t) for dado, então o momento equivalente
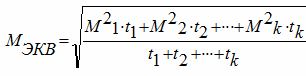
e a potência equivalente na velocidade n é dada pela expressão
Req = Meq • n / 9550 (kW).
Se o diagrama I = f (t) for dado, a corrente do equivalente de aquecimento
O valor calculado de PVr geralmente difere dos valores padrão, portanto, o valor obtido de PVr é arredondado para o valor padrão mais próximo ou a potência equivalente é recalculada usando a fórmula
Durante a operação, são observadas sobrecargas de curto prazo que excedem a potência nominal do motor. Eles não afetam significativamente o aquecimento dos motores, mas podem levar a operação incorreta ou parada. Portanto, o motor deve ser verificado quanto à capacidade de sobrecarga de acordo com a expressão
Pm / Pn = ku ∙ Mm / Mn,
onde Pm é a maior potência no diagrama de carga; Mm / Mn — o múltiplo do torque máximo é determinado pelo catálogo; coeficiente ku = 0,8 leva em consideração a possível queda de tensão na rede.
Se esta condição não for atendida, um motor com maior potência deve ser selecionado no catálogo e novamente verificado quanto à capacidade de sobrecarga.
Veja também neste tópico: Seleção de um motor para operação intermitente

A indústria produz uma série de motores de carga intermitente:
-
guindastes assíncronos com rotor esquilo da série MTKF e com rotor de fase da série MTF;
-
séries metalúrgicas similares MTKN e MTN;
-
DC série D.
As máquinas da série especificada são caracterizadas pela forma de um rotor alongado (âncora), que proporciona uma redução no momento de inércia. Para reduzir as perdas liberadas no enrolamento do estator durante os transientes, os motores das séries MTKF e MTKN possuem um escorregamento nominal aumentado snom = 7 ÷ 12%. A capacidade de sobrecarga dos motores do guindaste e da série metalúrgica é de 2,3 — 3 no ciclo de trabalho = 40%, que no ciclo de trabalho = 100% corresponde a λ = Mcr / Mnom100 = 4,4-5,5.