A seleção de um motor elétrico assíncrono para operação no modo de frenagem dinâmica por auto-excitação
 Motor elétrico assíncrono com rotor bobinado com o esquema de controle mais simples - a inclusão de resistência no circuito do rotor tem propriedades de controle extremamente baixas. Portanto, antes da disponibilidade de conversores de frequência no mercado, vários esquemas foram desenvolvidos para obter velocidade reduzida no modo abaixador.
Motor elétrico assíncrono com rotor bobinado com o esquema de controle mais simples - a inclusão de resistência no circuito do rotor tem propriedades de controle extremamente baixas. Portanto, antes da disponibilidade de conversores de frequência no mercado, vários esquemas foram desenvolvidos para obter velocidade reduzida no modo abaixador.
Na verdade, não há muitos deles. No exterior, o uso de uma máquina elétrica adicional - um freio de vórtice montado no mesmo eixo do motor principal - tornou-se generalizado. O esquema permite obter características mecânicas suficientemente rígidas ao reduzir a carga, mas esse acionamento elétrico possui características de energia extremamente baixas (a energia de frenagem é liberada no freio de vórtice). Além disso, o freio de vórtice tem um custo bastante alto e complica muito o layout da parte mecânica.
Portanto, para obter a velocidade de pouso em mecanismos de elevação baseados em um motor assíncrono com rotor de fase na fábrica da Dynamo no final dos anos 1970, uma equipe de projeto liderada por E.M. Pevzner introduziu a frenagem dinâmica auto-excitada.
Esse acionamento elétrico é amplamente utilizado em guindastes domésticos (painéis do tipo TSD, TSDI, KSDB para pontes, pórticos e pórticos, painéis de controle para guindastes de torre KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Assim, estamos falando de dezenas de milhares de guindastes em operação.
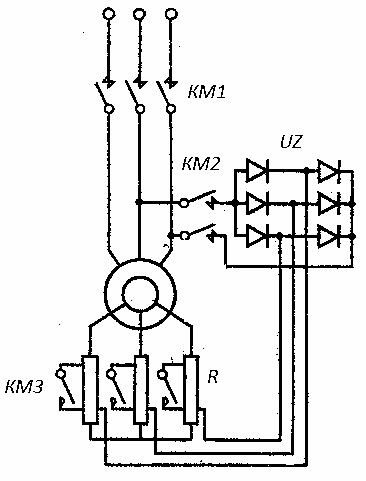
Arroz. 1. Esquema de inclusão de um motor assíncrono no modo de frenagem dinâmica por autoexcitação
O princípio da frenagem dinâmica com autoexcitação é o seguinte:
O circuito do rotor inclui retificador trifásico UZ (Fig. 1). O motor elétrico é desconectado da rede através do contator KM1. A tensão retificada é conectada ao enrolamento do estator através do contator KM2. Os contatos do contator KM3 estão fechados. Quando o freio é liberado (não mostrado no diagrama), o eixo do motor começa a girar sob a ação do peso em queda.
Um EMF é induzido no enrolamento do rotor, sob a influência do qual uma corrente começa a fluir no circuito rotor-estator. O motor desenvolve o torque de frenagem, a carga é reduzida a uma velocidade constante. O valor da velocidade é determinado pelo valor da resistência do circuito do rotor. Quanto maior a resistência, mais rápida a taxa de descida. Para aumentar a velocidade, o contator KM3 é desligado.
No modo de frenagem dinâmica de auto-excitação, o acionamento elétrico consome energia da rede apenas para alimentar o empurrador hidráulico do freio e o equipamento do contator de relé. Como exemplo, a Fig. 7 mostra as características mecânicas de um acionamento elétrico com um painel TSD.
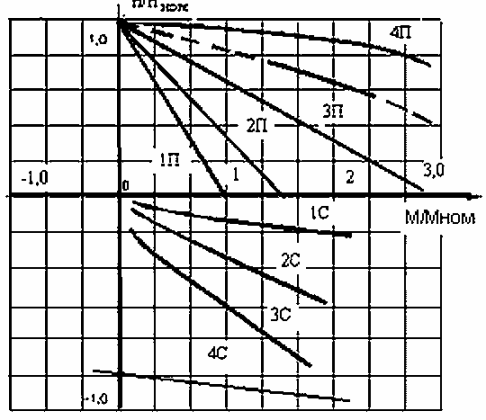
Arroz. 2. Características mecânicas do acionamento elétrico do mecanismo de elevação com o painel TSD
As características de frenagem dinâmica são designadas como 1C, 2C, 3C. Pode-se ver que as características têm dureza suficiente. O ajuste de velocidade é feito na faixa 1:8, que na maioria dos casos é suficiente para torneiras de massa.
A condição de auto-excitação do motor elétrico é:
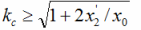
Onde x '2- resistência indutiva do enrolamento do rotor, Ohm; хо- resistência indutiva do circuito de magnetização. Om
Onde ks — coeficiente do esquema
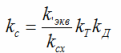
kd — coeficiente de redução da corrente do rotor para a corrente do estator; kcx — coeficiente do circuito de correção, para um circuito ponte trifásico kx = 0,85; kt é o coeficiente de transformação do motor do estator para o rotor
O coeficiente kd depende do esquema de conexão dos enrolamentos do estator, que são conectados a uma estrela em motores de torneiras domésticas a uma tensão de rede de 380 V.
O coeficiente kt depende do coeficiente de transformação, ou seja, da relação entre a tensão do estator e a tensão do rotor, que depende do tipo de motor. Por exemplo, para vários motores elétricos das séries MT e 4MT, o valor e os parâmetros relacionados são tabulados. 1.
Tabela 1.
Potência do tipo do motor elétrico, kWt Tensão do rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
A condição кс ≥ √(1 + 2х '2/хо) é realizada para motores do tipo MTN412-6, 4MTN225L6, que podem ser chamados de "excitados". Esses motores elétricos entram no modo de auto-excitação sem tomar decisões de circuito adicionais. No entanto, em dispositivos completos de baixa tensão (aparelhagem de baixa tensão ou painéis de controle) projetados para trabalhar em conjunto com esses motores, uma pequena excitação inicial é fornecida para operação confiável.
A excitação inicial é realizada pela passagem de uma constante, a chamada Um pequeno valor de "corrente de alimentação" (geralmente não mais que 10% da corrente nominal do motor) de um retificador de meia onda. Para motores excitados, em qualquer caso, isso é suficiente para uma transição confiável para o modo de frenagem dinâmica auto-excitada.
Os motores elétricos MTN512-6, 4MTN280M6, para os quais a condição кс ≥ √(1 + 2х '2/хо) não é satisfeita, são "desexcitados". Isso não significa que tais motores não possam operar no modo de frenagem dinâmica com auto-excitação, mas o valor da corrente adicional necessária para eles chega a 50% da corrente nominal do estator.Isso requer o uso de NKU (painéis de controle) especiais para motores elétricos não excitados. …
O motor elétrico tipo 4MTN280L10 com кс = √(1 + 2х '2/хо) está no limite de auto-excitação e qualquer alteração aleatória nos parâmetros pode violar a condição de auto-excitação. Portanto, tal motor também pode ser classificado como não excitável.
Os principais parâmetros que afetam a capacidade do motor elétrico de auto-excitar é a tensão nominal do rotor E2nom. O valor crítico de E2nom, no qual a auto-excitação não ocorre sem uma grande corrente de alimentação, deve ser considerado como 300 V.
Essa característica do modo de frenagem dinâmica de auto-excitação foi levada em consideração pela fábrica da Dynamo e pela Sibelektromotor PO ao desenvolver uma série de motores elétricos para guindastes de 4 MT no início dos anos 80.
Em particular, o valor E2nom para alguns motores elétricos foi reduzido em comparação com a série MT anterior para tornar os motores excitáveis.
Por exemplo, para o motor elétrico 4MTN225L6, amplamente utilizado no acionamento elétrico de guindastes de torre, o E2nom foi reduzido em comparação com o motor anterior da série MTN512-6 de 340 para 290 V, o que tornava o motor auto-excitado. Mais tarde, a OJSC "Sibelectromotor" iniciou a produção do motor elétrico 4MTM225L6 com os mesmos parâmetros.
Com o tempo, motores elétricos com finalidade semelhante começaram a ser produzidos por outros fabricantes.
A Rzhevsky Crane Construction Plant produz o motor elétrico MKAF225L6, a Siberian Electrotechnical Company produz o motor elétrico 4MTM225L6 PND.Apesar da aparência diferente do protótipo relacionada às capacidades tecnológicas de cada um dos fabricantes, todos esses motores elétricos têm os mesmos parâmetros elétricos e dimensões de instalação e são totalmente intercambiáveis.
A diferença nos nomes dos motores permite ao usuário fazer uma escolha informada de um ou outro fabricante, guiado por suas próprias preferências, preço, prazo de entrega, etc. E, ao mesmo tempo, tenha certeza absoluta de que a substituição do motor elétrico de um fabricante de torneira por um motor elétrico de outro fabricante não causará mau funcionamento da torneira ou acidente.
Porém, na última década, surgiram no mercado nacional motores elétricos de diversos fabricantes, cuja marca reproduz exatamente a marca do motor elétrico "original" produzido pela JSC "Sibelectromotor". Pode-se supor que a origem dos motores elétricos esteja ligada ao grande vizinho oriental de nosso país. Seu preço é ligeiramente inferior ao dos fabricantes tradicionais, portanto, o interesse por eles por parte dos fornecedores das empresas é compreensível.
Assim, encomendando um motor elétrico para instalação em um guindaste fabricado ou substituindo um motor elétrico danificado em um guindaste por um em funcionamento, você pode obter um motor elétrico de fabricante desconhecido, com E2nom diferente do protótipo do motor elétrico.
A situação lembra um pouco o início dos anos 90, quando vários grupos pop com o mesmo nome percorreram o país ao mesmo tempo.
Lembremos mais uma vez que a relação E2nom / I2nom é o parâmetro mais importante de um motor com rotor bobinado, afetando a escolha dos resistores de partida, equipamento relé-contator e, como mencionado acima, na condição de autoexcitação do motor elétrico.
Freqüentemente, no entanto, não há nenhum dado do rotor nas placas de identificação dos motores clonados. Aqui está um exemplo:
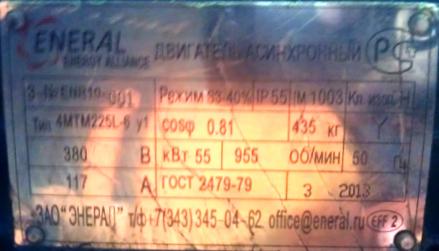
Arroz. 3. Placa de identificação do motor assíncrono do guindaste de rotor
A propósito, este motor elétrico tinha o valor "correto" E2nom, só que agora precisava ser determinado empiricamente.
Nos catálogos de outros fabricantes para o motor elétrico 4MTM225L6, é indicado o valor E2nom = 340 V, ou seja, o motor excitado tornou-se um motor não excitado. A consequência do uso de tal motor elétrico como parte de um acionamento elétrico com frenagem dinâmica com autoexcitação é uma queda na carga e separação do motor elétrico com destruição mecânica dos enrolamentos do rotor e do estator.
É exatamente essa imagem que o autor observou recentemente em uma das mais antigas empresas russas de construção de máquinas, onde foi entregue uma nova ponte rolante com motor elétrico clonado do tipo 4MTM225L6 com E2n = 340 V. Só por sorte, as pessoas não sofrer. Além disso, o dono do guindaste restaura o motor três (!) vezes após se esquivar.
Outro fabricante de motores elétricos clonados, aparentemente tendo repetidamente sofrido acidentes semelhantes, agora produz dois motores elétricos da mesma marca (!). Um com E2nom = 340 V, o outro com E2nom = 264 V é fornecido no catálogo com uma observação: "para taps do tipo KB", ou seja, guindastes de torre.
Esse motor é de fato mais amplamente usado em guindastes de torre, mas também é instalado em guindastes de ponte. Então você pode ouvir o diálogo entre o Fornecedor e o Cliente: “Para qual guindaste você precisa de um motor? Para o piso. Então pegue este (E2nom = 340 V). » E no acionamento das talhas elétricas existe um painel de controle com frenagem dinâmica auto-excitada. O resultado está descrito acima.
Ao mesmo tempo, ninguém está dizendo que esses motores elétricos são defeituosos ou não confiáveis e não podem ser usados em guindastes. Quanto mais opções no mercado, melhor. Como se costuma dizer, existem mais motores bons e diferentes. Só que a marca deles engana o consumidor, o que pode trazer consequências perigosas.
Para usar um motor elétrico com parâmetros de rotor diferentes do protótipo, você deve:
-
Meça E2nom quando o circuito do rotor estiver aberto e o enrolamento do estator estiver conectado à rede;
-
Com base nas medições E2nom, calcule, selecione e ordene resistores de lastro;
-
Escolha um quadro de comando para motores elétricos sem excitação no catálogo e encomende-o.
Ou você pode simplesmente perguntar sobre o valor do E2nom antes de encomendar um motor que atraia seu preço e concordar especificamente com isso no contrato. No entanto, isso não impede a medição de E2nom durante o controle de entrada do motor solicitado.
Resumindo o exposto, podemos tirar as seguintes conclusões:
-
No acionamento elétrico de torneiras domésticas baseadas em motores elétricos de rotor de fase, a frenagem dinâmica auto-excitada é amplamente utilizada. Dezenas de milhares desses acionamentos elétricos estão em operação. Eles ainda estão sendo emitidos.
-
Para operar no modo de frenagem dinâmica auto-excitada, o motor elétrico deve ter uma certa relação E2nom / I2nom.
-
A principal condição para autoexcitação de um motor elétrico com rotor bobinado é o valor de E2nom ≤ 300 V.
-
A utilização de motores elétricos com E2nom > 300 V com painéis de controle projetados para motores elétricos excitados pode provocar a queda da carga e destruir o motor elétrico.