Conversor de frequência - tipos, princípio de operação, esquemas de conexão
 O rotor de qualquer motor elétrico é acionado por forças causadas por um campo eletromagnético rotativo dentro do enrolamento do estator. Sua velocidade geralmente é determinada pela frequência industrial da rede elétrica.
O rotor de qualquer motor elétrico é acionado por forças causadas por um campo eletromagnético rotativo dentro do enrolamento do estator. Sua velocidade geralmente é determinada pela frequência industrial da rede elétrica.
Seu valor padrão de 50 hertz implica cinquenta períodos de oscilação em um segundo. Em um minuto, seu número aumenta 60 vezes e é 50 × 60 = 3.000 revoluções. O rotor gira o mesmo número de vezes sob a influência do campo eletromagnético aplicado.
Se você alterar o valor da frequência da rede aplicada ao estator, poderá ajustar a velocidade de rotação do rotor e do inversor conectado a ele. Este princípio é a base do controle de motores elétricos.
Tipos de conversores de frequência
Por design, os conversores de frequência são:
1. tipo de indução;
2. eletrônico.
Motores assíncronos fabricados de acordo com o esquema com um rotor de fase e iniciados no modo gerador, são representantes do primeiro tipo. Durante a operação, eles têm baixa eficiência e são caracterizados por baixa eficiência.Portanto, eles não encontraram ampla aplicação na produção e são usados muito raramente.
O método de conversão eletrônica de frequência permite uma regulação suave da velocidade de máquinas assíncronas e síncronas. Neste caso, um dos dois princípios de controle pode ser aplicado:
1. De acordo com uma característica predeterminada da dependência da velocidade de rotação da frequência (V / f);
2. método de controle vetorial.
O primeiro método é o mais simples e menos perfeito, e o segundo é usado para controlar com precisão as velocidades de rotação de equipamentos industriais críticos.
Características do controle vetorial de conversão de frequência
A diferença entre este método é a interação, a influência do dispositivo de controle do conversor no «vetor espacial» do fluxo magnético girando com a frequência do campo do rotor.
Algoritmos para conversores para trabalhar com este princípio são criados de duas maneiras:
1. controle sem sensor;
2. regulação do fluxo.
O primeiro método é baseado na determinação de uma certa dependência da alternância de sequências modulação por largura de pulso (PWM) inversor para algoritmos predefinidos. Neste caso, a amplitude e a frequência da tensão de saída do conversor são controladas pela corrente de escorregamento e pela carga, mas sem o uso da realimentação da velocidade do rotor.
Este método é usado ao controlar vários motores elétricos conectados em paralelo com o conversor de frequência.O controle de fluxo envolve monitorar as correntes de operação dentro do motor com sua decomposição em componentes ativos e reativos e fazer ajustes na operação do conversor para definir a amplitude, frequência e ângulo dos vetores de tensão de saída.
Isso melhora a precisão do motor e aumenta os limites de seu ajuste. O uso do controle de fluxo amplia as capacidades de acionamentos que operam em baixas velocidades com altas cargas dinâmicas, como guindastes ou máquinas de enrolamento industriais.
O uso da tecnologia vetorial permite que o controle de torque dinâmico seja implementado motores assíncronos trifásicos.
Circuito equivalente
Um circuito elétrico básico simplificado de um motor de indução pode ser representado da seguinte forma.
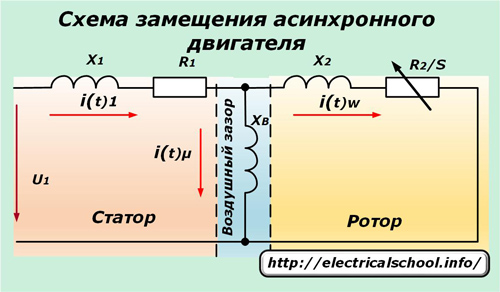
Uma tensão u1 é aplicada aos enrolamentos do estator, que possuem uma resistência ativa R1 e uma resistência indutiva X1. Ele, vencendo a resistência do entreferro Xv, é transformado no enrolamento do rotor, causando nele uma corrente que supera sua resistência.
Circuito equivalente de um circuito vetorial
Sua construção ajuda a entender os processos que ocorrem no motor de indução.

A energia da corrente do estator é dividida em duas partes:
-
iµ — partição de formação de fluxo;
-
iw — componente gerador de momento.
Nesse caso, o rotor possui uma resistência ativa dependente do escorregamento R2 / s.
Para controle sem sensor, o seguinte é medido:
-
tensão u1;
-
atual i1.
De acordo com seus valores, eles calculam:
-
iµ — componente de fluxo formando o fluxo;
-
iw — torque gerador de valor.
O algoritmo de cálculo passou a incluir um circuito eletrônico equivalente de um motor de indução com reguladores de corrente, que leva em consideração as condições de saturação do campo eletromagnético e as perdas de energia magnética no aço.
Ambos os componentes dos vetores de corrente, diferentes em ângulo e amplitude, giram juntos com o sistema de coordenadas do rotor e tornam-se um sistema estacionário de orientação do estator.
De acordo com este princípio, os parâmetros do conversor de frequência são ajustados de acordo com a carga do motor de indução.
O princípio de operação do conversor de frequência
Este dispositivo, também chamado de inversor, é baseado em uma dupla mudança na forma de onda da rede elétrica.
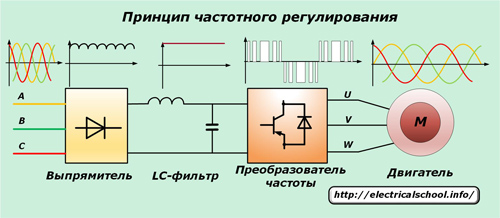
Inicialmente, a tensão industrial é alimentada a um retificador com diodos poderosos que removem os harmônicos senoidais, mas deixam as ondulações do sinal. Para sua remoção, é fornecido um banco de capacitores com indutância (filtro LC), que fornece uma forma estável e suavizada à tensão retificada.
O sinal então vai para a entrada do conversor de frequência, que é um circuito ponte trifásico de seis transistores de força Série IGBT ou MOSFET com diodos de proteção de tensão de polaridade reversa. Os tiristores usados anteriormente para esses fins não têm velocidade suficiente e operam com grandes perturbações.
Para ligar o modo "freio" do motor, um transistor controlado com um poderoso resistor que dissipa a energia pode ser instalado no circuito. Essa técnica permite que a tensão gerada pelo motor seja removida para proteger os capacitores do filtro contra sobrecarga e danos.
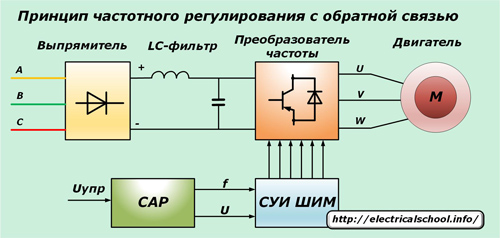
O método de controle vetorial de frequência do conversor permite criar circuitos que realizam o controle automático do sinal dos sistemas ACS. Um sistema de gerenciamento é usado para isso:
1. amplitude;
2. PWM (simulação de largura de pulso).
O método de controle de amplitude é baseado na alteração da tensão de entrada e o PWM é baseado no algoritmo para comutar os transistores de potência a uma tensão de entrada constante.
Com a regulação PWM, um período de modulação de sinal é criado quando o enrolamento do estator é conectado em ordem estrita aos terminais positivo e negativo do retificador.
Como a frequência do relógio do gerador é bastante alta, no enrolamento do motor elétrico, que possui resistência indutiva, eles são suavizados para uma onda senoidal normal.
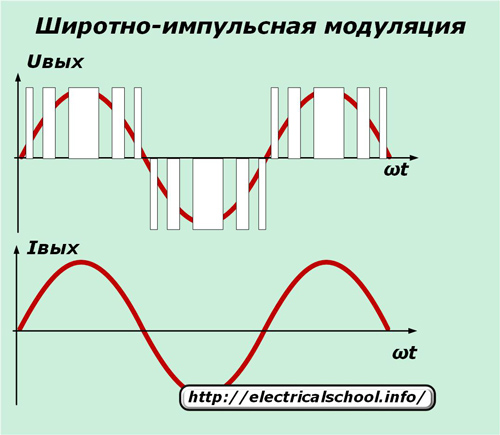
Os métodos de controle PWM maximizam a eliminação de perdas de energia e fornecem alta eficiência de conversão devido ao controle simultâneo de frequência e amplitude. Eles se tornaram disponíveis devido ao desenvolvimento das tecnologias de controle de tiristores com bloqueio de energia da série GTO ou marcas bipolares de transistores IGBT de porta isolada.
Os princípios de sua inclusão para controlar um motor trifásico são mostrados na foto.
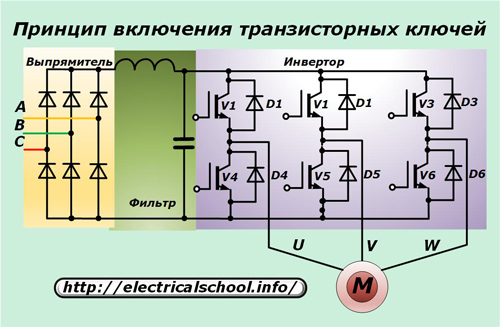
Cada um dos seis IGBTs é conectado em circuito antiparalelo ao seu próprio diodo de corrente reversa. Nesse caso, a corrente ativa do motor de indução passa pelo circuito de potência de cada transistor e seu componente reativo é direcionado pelos diodos.
Para eliminar a influência do ruído elétrico externo na operação do inversor e do motor, o circuito do conversor de frequência pode incluir filtro de redução de ruídoliquidação:
-
interferência de rádio;
-
descargas elétricas causadas por equipamentos em operação.
Estes são sinalizados pelo controlador e fiação blindada é usada entre o motor e os terminais de saída do inversor para reduzir o choque.
Para melhorar a precisão da operação dos motores assíncronos, o circuito de controle dos conversores de frequência inclui:
-
entrada de comunicação com recursos avançados de interface;
-
controlador embutido;
-
cartão de memória;
-
Programas;
-
display LED informativo mostrando os principais parâmetros de saída;
-
chopper de frenagem e filtro EMC integrado;
-
sistema de refrigeração do circuito baseado em sopro com ventiladores de maior recurso;
-
a função de aquecimento do motor por corrente contínua e algumas outras possibilidades.
Diagramas de fiação operacional
Os conversores de frequência são projetados para funcionar com redes monofásicas ou trifásicas. No entanto, se houver fontes industriais de corrente contínua com tensão de 220 volts, os inversores poderão ser alimentados por elas.

Os modelos trifásicos são projetados para tensão de rede de 380 volts e alimentam o motor elétrico. Os inversores monofásicos são alimentados por 220 volts e produzem três fases distribuídas ao longo do tempo.
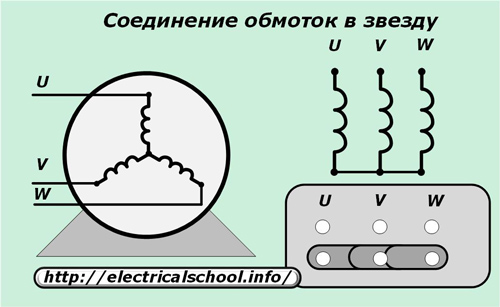
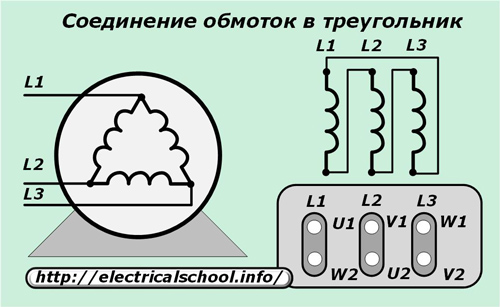
O esquema de conexão do conversor de frequência ao motor pode ser realizado de acordo com os esquemas:
-
estrelas;
-
triângulo.
Os enrolamentos do motor são montados em «estrela» para o conversor, alimentados por uma rede trifásica de 380 volts.
De acordo com o esquema "delta", os enrolamentos do motor são montados quando o conversor de energia é conectado a uma rede monofásica de 220 volts.
Ao escolher um método para conectar um motor elétrico a um conversor de frequência, você precisa prestar atenção à relação de potência que um motor em funcionamento pode criar em todos os modos, incluindo uma partida lenta e carregada, com os recursos do inversor.
É impossível sobrecarregar constantemente o conversor de frequência e uma pequena reserva de sua potência de saída garantirá sua operação a longo prazo e sem problemas.