Características mecânicas de um motor de indução em diferentes modos, tensões e frequências
 As características mecânicas dos motores de indução podem ser expressas como n = f (M) ou n=e(I). No entanto, as características mecânicas dos motores assíncronos são frequentemente expressas na forma de uma dependência M = f(S), onde C — deslizante, S = (nc-n) / nc, onde ns — velocidade síncrona.
As características mecânicas dos motores de indução podem ser expressas como n = f (M) ou n=e(I). No entanto, as características mecânicas dos motores assíncronos são frequentemente expressas na forma de uma dependência M = f(S), onde C — deslizante, S = (nc-n) / nc, onde ns — velocidade síncrona.
Na prática, uma fórmula simplificada chamada fórmula de Kloss é utilizada para a construção gráfica das características mecânicas:

aqui: Mk — valor de torque crítico (máximo). Este valor de momento corresponde ao escorregamento crítico

onde λm = Mk / Mn
A fórmula de Kloss é usada para resolver problemas relacionados ao acionamento elétrico realizado usando um motor de indução. Usando a fórmula de Kloss, você pode construir um gráfico de características mecânicas de acordo com os dados do passaporte do motor de indução. Para cálculos práticos, apenas o sinal de mais deve ser considerado na fórmula ao determinar o momento crítico antes da raiz.
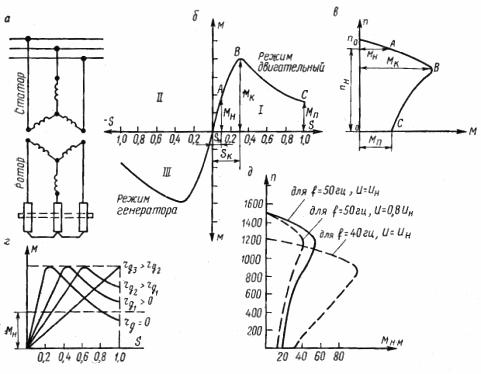
Arroz. 1.Motor assíncrono: a — diagrama esquemático, b — característica mecânica M = f (S) — natural nos modos motor e gerador, c — característica mecânica natural n = f (M) no modo motor, d — características mecânicas de um reostato artificial, e — características mecânicas para diferentes tensões e frequências.

Motor de indução gaiola de esquilo
Como pode ser visto a partir da fig. 1, características mecânicas de um motor de indução localizado nos quadrantes I e III. A parte da curva no quadrante I corresponde a um valor de escorregamento positivo e caracteriza o modo de operação do motor assíncrono, e no quadrante III, o modo gerador. O modo do motor é de maior interesse prático.
O gráfico das características mecânicas do modo do motor contém três pontos característicos: A, B, C e pode ser dividido condicionalmente em duas seções: OB e BC (Fig. 1, c).
O ponto A corresponde ao torque nominal do motor e é determinado pela fórmula Mn = 9,55•103•(Strn /nn)
Este momento corresponde deslizamento nominal, que para motores com aplicação industrial geral tem um valor na faixa de 1 a 7%, ou seja, Sn = 1 - 7%. Ao mesmo tempo, os motores pequenos têm mais escorregamento e os grandes têm menos.
Motores de alto deslizamento destinados a carga de choque têm Сn~15%. Isso inclui, por exemplo, motores CA de série única.
O ponto C da característica corresponde ao valor do torque inicial que ocorre no eixo do motor na partida. Este momento Mp é denominado inicial ou inicial. Neste caso, o escorregamento é igual à unidade e a velocidade é zero. Torque inicial é fácil determinar a partir dos dados da tabela de referência, que mostra a relação entre o torque de partida e o nominal Mp / Mn.
A magnitude do torque de partida em valores constantes de tensão e frequência de corrente depende da resistência ativa no circuito do rotor. Neste caso, inicialmente à medida que a resistência ativa aumenta, o valor do torque de partida aumenta, atingindo seu máximo quando a resistência ativa do circuito do rotor é igual à resistência indutiva total do motor. Posteriormente, à medida que a resistência ativa do rotor aumenta, o valor do torque inicial diminui, tendendo a zero no limite.
O ponto C (Fig. 1, b e c) corresponde a um momento máximo que pode desenvolver o motor em toda a faixa de rotações de n = 0 a n = ns... Este momento é chamado de momento crítico (ou capotamento) Mk . O momento crítico também corresponde ao deslizamento crítico Sk. Quanto menor for o valor do escorregamento crítico Sk, bem como o valor do escorregamento nominal Сn, maior será a rigidez das características mecânicas.
Os momentos inicial e crítico são determinados pelos nominais. De acordo com GOST para máquinas elétricas com motor de gaiola de esquilo, a condição Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5 deve ser atendida.
Deve-se notar que o valor do momento crítico não depende da resistência ativa do circuito do rotor, enquanto o escorregamento crítico Сk é diretamente proporcional a esta resistência.Isso significa que, com o aumento da resistência ativa do circuito do rotor, o valor do momento crítico permanece inalterado, mas o máximo da curva de torque muda para valores de escorregamento crescentes (Fig. 1, d).
A magnitude do torque crítico é diretamente proporcional ao quadrado da tensão aplicada ao estator e inversamente proporcional ao quadrado da frequência das tensões e à frequência da corrente no estator.
Se, por exemplo, a tensão fornecida ao motor for igual a 85% do valor nominal, então a magnitude do torque crítico será 0,852 = 0,7225 = 72,25% do torque crítico na tensão nominal.
O oposto é observado ao mudar a frequência. Se, por exemplo, para um motor projetado para operar com frequência de corrente de = 60 Hz, uma corrente de alimentação com frequência de = 50 Hz, então o momento crítico virá em (60/50)2=1,44 vezes maior que o valor oficial a sua frequência (Fig. 1, e).
O momento crítico caracteriza a capacidade de sobrecarga instantânea do motor, ou seja, mostra qual momento (em poucos segundos) de sobrecarga o motor é capaz de suportar sem consequências prejudiciais.

A seção da característica mecânica de zero ao valor máximo (crítico) (ver Fig. 1, biv) é chamada de parte estável da característica e a seção BC (Fig. 1, c) - a parte instável.
Esta divisão é explicada pelo fato de que na parte crescente das características OF com deslizamento crescente, ou seja, à medida que a velocidade diminui, o torque desenvolvido pelo motor aumenta.Isso significa que à medida que a carga aumenta, ou seja, à medida que o torque de frenagem aumenta, a velocidade de rotação do motor diminui e o torque aumentado por ela aumenta. Quando a carga diminui, ao contrário, a velocidade aumenta e o torque diminui. À medida que a carga muda em toda a faixa da parte estável da característica, a velocidade de rotação e o torque do motor mudam.
O motor não pode desenvolver mais do que o torque crítico, e se o torque de frenagem for maior, o motor deve inevitavelmente parar. Um capotamento do motor acontece, como dizem.
Uma característica mecânica em U e I constantes e a ausência de resistência adicional no circuito do rotor é chamada de característica natural (característica de um motor de indução tipo gaiola de esquilo com um rotor enrolado sem resistência adicional no circuito do rotor). As características artificiais ou reostáticas são chamadas aquelas que correspondem à resistência adicional no circuito do rotor.
Todos os valores de torque de partida são diferentes e dependem da resistência ativa do circuito do rotor. Sliders de diferentes magnitudes correspondem ao mesmo torque nominal Mn. À medida que a resistência do circuito do rotor aumenta, o escorregamento aumenta e, portanto, a velocidade do motor diminui.
Devido à inclusão da resistência ativa no circuito do rotor, a característica mecânica na parte estável é esticada na direção do aumento do escorregamento, proporcional à resistência.Isso significa que a velocidade do motor começa a variar significativamente dependendo da carga do eixo e a característica dura torna-se macia.