Condições térmicas e potência nominal do motor
 Quando o motor elétrico funciona, ele perde para cobrir a parte da energia elétrica consumida que é desperdiçada. As perdas ocorrem na resistência ativa dos enrolamentos, no aço quando o fluxo magnético muda no circuito magnético, bem como perdas mecânicas devido ao atrito nos mancais e atrito das partes rotativas da máquina contra o ar. Ao final, toda a energia perdida é convertida em energia térmica, que é utilizada para aquecer o motor e se dissipar no meio ambiente.
Quando o motor elétrico funciona, ele perde para cobrir a parte da energia elétrica consumida que é desperdiçada. As perdas ocorrem na resistência ativa dos enrolamentos, no aço quando o fluxo magnético muda no circuito magnético, bem como perdas mecânicas devido ao atrito nos mancais e atrito das partes rotativas da máquina contra o ar. Ao final, toda a energia perdida é convertida em energia térmica, que é utilizada para aquecer o motor e se dissipar no meio ambiente.
As perdas do motor são constantes e variáveis. As constantes incluem perdas de aço e perdas mecânicas em enrolamentos onde a corrente é constante e perdas variáveis em enrolamentos de motores.
No período inicial após o acendimento, a maior parte do calor liberado no motor vai para o aumento de sua temperatura, e menos vai para o meio ambiente. Então, à medida que a temperatura do motor aumenta, mais e mais calor é transferido para o ambiente e chega um ponto em que todo o calor gerado é dissipado no espaço.O equilíbrio térmico é então estabelecido e o aumento adicional na temperatura do motor para. Essa temperatura de aquecimento do motor é chamada de estado estacionário. A temperatura estável permanece constante ao longo do tempo se a carga do motor não mudar.
A quantidade de calor Q que é liberada no motor em 1 s pode ser determinada pela fórmula

onde η- eficiência do motor; P2 é a potência do eixo do motor.
Segue-se da fórmula que quanto maior a carga no motor, mais calor é gerado nele e maior é sua temperatura estacionária.
 A experiência com a operação de motores elétricos mostra que a principal causa de seu mau funcionamento é o superaquecimento do enrolamento. Desde que a temperatura do isolamento não exceda o valor permitido, o desgaste térmico do isolamento se acumula muito lentamente. Mas à medida que a temperatura aumenta, o desgaste do isolamento aumenta acentuadamente. Praticamente acredite que o superaquecimento do isolamento a cada 8°C reduz sua vida útil pela metade. Assim, um motor com isolamento de algodão dos enrolamentos em carga nominal e temperatura de aquecimento de até 105 ° C pode funcionar por cerca de 15 anos, quando sobrecarregado e a temperatura sobe para 145 ° C, o motor falha após 1,5 meses.
A experiência com a operação de motores elétricos mostra que a principal causa de seu mau funcionamento é o superaquecimento do enrolamento. Desde que a temperatura do isolamento não exceda o valor permitido, o desgaste térmico do isolamento se acumula muito lentamente. Mas à medida que a temperatura aumenta, o desgaste do isolamento aumenta acentuadamente. Praticamente acredite que o superaquecimento do isolamento a cada 8°C reduz sua vida útil pela metade. Assim, um motor com isolamento de algodão dos enrolamentos em carga nominal e temperatura de aquecimento de até 105 ° C pode funcionar por cerca de 15 anos, quando sobrecarregado e a temperatura sobe para 145 ° C, o motor falha após 1,5 meses.
De acordo com o GOST, os materiais isolantes usados na engenharia elétrica são divididos em sete classes em termos de resistência ao calor, para cada uma das quais é definida a temperatura máxima permitida (Tabela 1).
O excesso permitido da temperatura do enrolamento do motor acima da temperatura ambiente (na URSS + 35 ° C é aceito) para a classe de resistência ao calor Y é de 55 ° C, para a classe A - 70 ° C, para a classe B - 95 ° C , para classe I — 145 ° C, para classe G acima de 155 ° C.O aumento de temperatura de um determinado motor depende da magnitude de sua carga e modo de operação. Em temperatura ambiente abaixo de 35 ° C, o motor pode ser carregado acima de sua potência nominal, mas de forma que a temperatura de aquecimento do isolamento não exceda os limites permitidos.
Características do material Classe de resistência ao calor Temperatura máxima admissível, ° C Tecidos de algodão não impregnados, fios, papel e materiais fibrosos de celulose e seda Y 90 Os mesmos materiais, mas impregnados com aglutinantes A 105 Algumas películas orgânicas sintéticas E 120 Mica, amianto e outros materiais de fibra de vidro contendo aglutinantes orgânicos V 130 Os mesmos materiais em combinação com aglutinantes sintéticos e agentes de impregnação F 155 Os mesmos materiais mas em combinação com silício, aglutinantes orgânicos e compostos de impregnação H 180 Mica, materiais cerâmicos, vidro, quartzo, amianto, usados sem aglutinantes ou com aglutinantes inorgânicos G superior a 180
Com base em uma quantidade conhecida de calor B dissipada quando o motor está funcionando, um excesso de temperatura do motor τ° C acima da temperatura ambiente pode ser calculado, ou seja, temperatura de superaquecimento

onde A é a transferência de calor do motor, J / deg • s; e é a base dos logaritmos naturais (e = 2,718); C é a capacidade térmica do motor, J/cidade; τО- o aumento inicial da temperatura do motor em τ.
A temperatura do motor em regime permanente τу pode ser obtida a partir da expressão anterior tomando τ = ∞... Então τу = Q / À... Em τо = 0, a igualdade (2) assume a forma
Então denotamos a razão C / A para T
onde T é a constante de tempo de aquecimento, s.
A constante de aquecimento é o tempo que leva para o motor aquecer até a temperatura de estado estacionário na ausência de transferência de calor para o ambiente. Na presença de transferência de calor, a temperatura de aquecimento será menor e igual a
A constante de tempo pode ser encontrada graficamente (Fig. 1, a). Para fazer isso, uma linha tangente é traçada desde a origem das coordenadas até cruzar com uma linha reta horizontal passando pelo ponto a, correspondente à temperatura de aquecimento estacionário. O segmento ss será igual a T e o segmento ab será igual ao tempo Ty durante o qual o motor atinge uma temperatura de estado estacionário τу… Geralmente é considerado igual a 4T.
A constante de aquecimento depende da potência nominal do motor, sua velocidade, projeto e método de resfriamento, mas não depende da magnitude de sua carga.
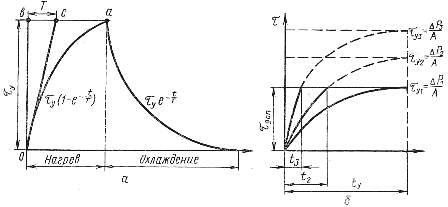
Arroz. 1. Curvas de aquecimento e resfriamento do motor: a — definição gráfica da constante de aquecimento; b — curvas de aquecimento em diferentes cargas
Se o motor, após aquecer, for desligado da rede, a partir desse momento deixa de gerar calor, mas o calor acumulado continua a dissipar-se para o ambiente, o motor arrefece.
A equação de resfriamento tem a forma

e a curva é mostrada na Fig. 1, a.
Na expressão, To é a constante de tempo de resfriamento. Ela difere da constante de aquecimento T porque a transferência de calor do motor em repouso difere da transferência de calor do motor em funcionamento.A igualdade é possível quando o motor desconectado da rede possui ventilação externa.  Normalmente, a curva de resfriamento é mais plana que a curva de aquecimento. Para motores com fluxo de ar externo, To é aproximadamente 2 vezes maior que T. Na prática, podemos supor que após um intervalo de tempo de 3To a 5To, a temperatura do motor torna-se igual à temperatura ambiente.
Normalmente, a curva de resfriamento é mais plana que a curva de aquecimento. Para motores com fluxo de ar externo, To é aproximadamente 2 vezes maior que T. Na prática, podemos supor que após um intervalo de tempo de 3To a 5To, a temperatura do motor torna-se igual à temperatura ambiente.
Com uma seleção correta da potência nominal do motor, a temperatura de superaquecimento em estado estacionário deve ser igual ao aumento de temperatura permitido τaddcorrespondente à classe de isolamento do fio do enrolamento. As diferentes cargas P1 <P2 <P3 do mesmo motor correspondem a certas perdas ΔP1 <ΔP2 <ΔP3 e aos valores da temperatura de superaquecimento estabelecida (Fig. 1, b). Com carga nominal, o motor pode operar por um longo tempo sem superaquecimento perigoso, enquanto quando a carga aumenta para o tempo de comutação permitido, não será superior a t2 e com potência não superior a t3.
Com base no exposto, podemos dar a seguinte definição de potência nominal do motor. A potência nominal do motor é a potência do eixo na qual a temperatura de seu enrolamento excede a temperatura ambiente em uma quantidade correspondente aos padrões de superaquecimento aceitos.